

A factory inspection UAV autonomous path cruising and intelligent obstacle avoidance method
An intelligent obstacle avoidance and UAV technology, applied in three-dimensional position/channel control, vehicle position/route/altitude control, instruments and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
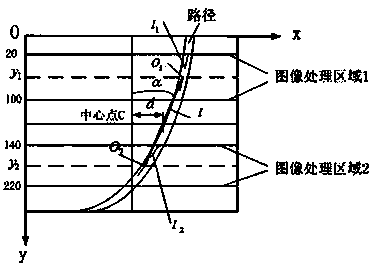
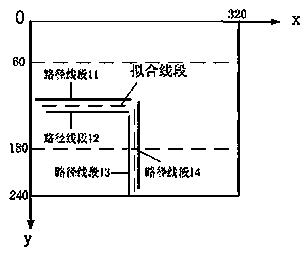
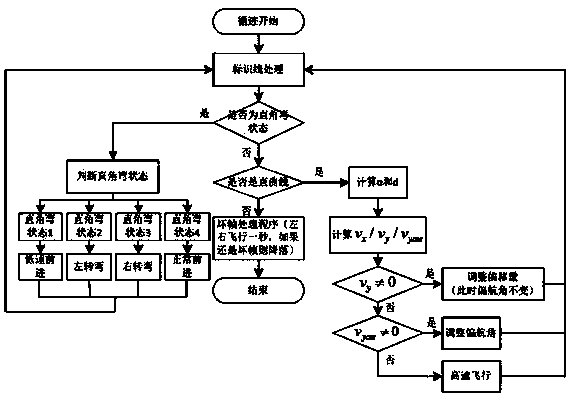
[0045] The present invention provides an autonomous path cruising and intelligent obstacle avoidance method of a factory inspection UAV. The present invention uses a curve detection method and a right-angle bend detection method to process the marking lines separately, and controls the program flow so that the UAV can cruise according to different path states. And the incomplete artificial potential field method based on Follow-Wall behavior is adopted to avoid the deficiency of the artificial potential field method, so that when the UAV encounters an obstacle, it can move along the edge of the obstacle until it reaches the predetermined location.
[0046] A method for autonomous cruising and intelligent obstacle avoidance of an unmanned aerial vehicle for factory inspection, specifically comprising the following steps:
[0047] Step 1: The came...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More