

Articulated vehicle path tracking control method
A tracking control and vehicle path technology, applied in the direction of electric controllers, controllers with specific characteristics, etc., can solve the problem of not being able to track the same path well, so as to reduce the incidence of driving accidents, good path tracking, The effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. The embodiments listed in the present invention are only used to illustrate the present invention, but not to limit the scope of the present invention. Any obvious modifications or changes made to the present invention do not depart from the spirit and scope of the present invention.
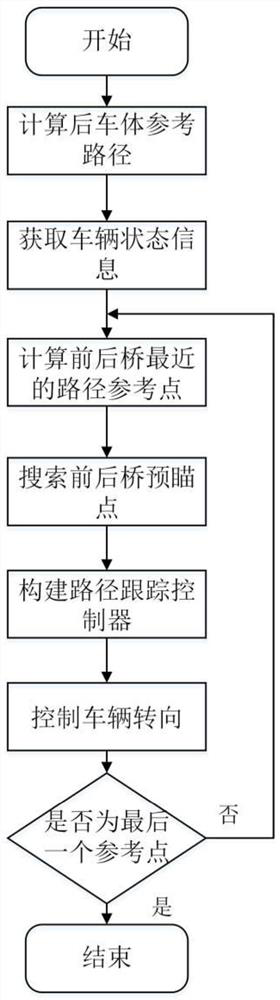
[0024] A path tracking control method for an articulated vehicle, comprising the following steps:
[0025] Step S1, according to the existing reference path point as the reference point of the front vehicle body, calculate the path reference point of the rear vehicle body;
[0026] Step S2, obtaining the current position of the vehicle;
[0027] Step S3, find the path point closest to the front axle on the reference path of the front axle, and find the path point ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More