

STM32F429-based dual-motor-driven unmanned ship control system
A dual-motor drive and control system technology, applied in the direction of non-electric variable control, control/adjustment system, two-dimensional position/channel control, etc., can solve the problems of insufficient control accuracy, poor system robustness, and failure to overcome , to achieve the effect of improving fault tolerance, increasing working area and improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
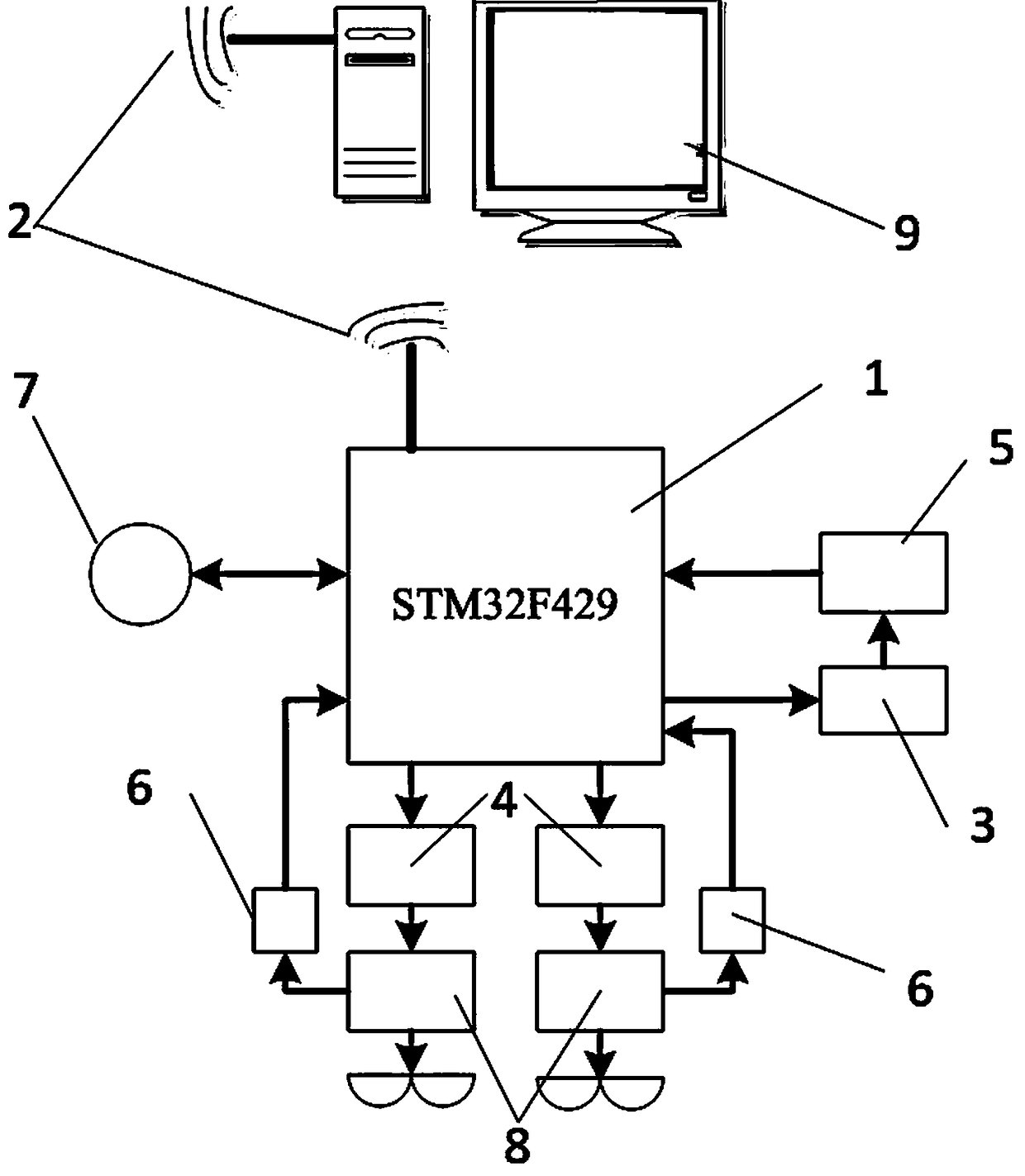
[0042] In this embodiment, the ground station system can be opened on the operating system of the unmanned ship ground station 9, click the detection button, the ground station communicates wirelessly with the ship control system through the data transmission module, and transmits the detection command to the STM32F429 control chip of the control module 1 At this time, the STM32F429 control chip checks the status of the unmanned ship and sends back information such as the position, speed, heading angle, and motor status of the unmanned ship to the ground station. If the display is normal, the user can set it on the ground station. Start destination, and plan the route manually or automatically.
[0043] After the path planning is completed, click OK, and the control command can be transmitted to the STM32F429 control chip through the data transmission module 2, and the data transmission module 2 performs data interaction with the STM32F429 control chip 1 through the serial port...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More