

Multi-robot formation traceability control method for sea surface spill oil
A multi-robot, sea oil spill technology, applied in the direction of target search control, two-dimensional position/channel control, control/regulation system, etc., can solve problems such as strong uncertainty and low efficiency of oil spill points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings.
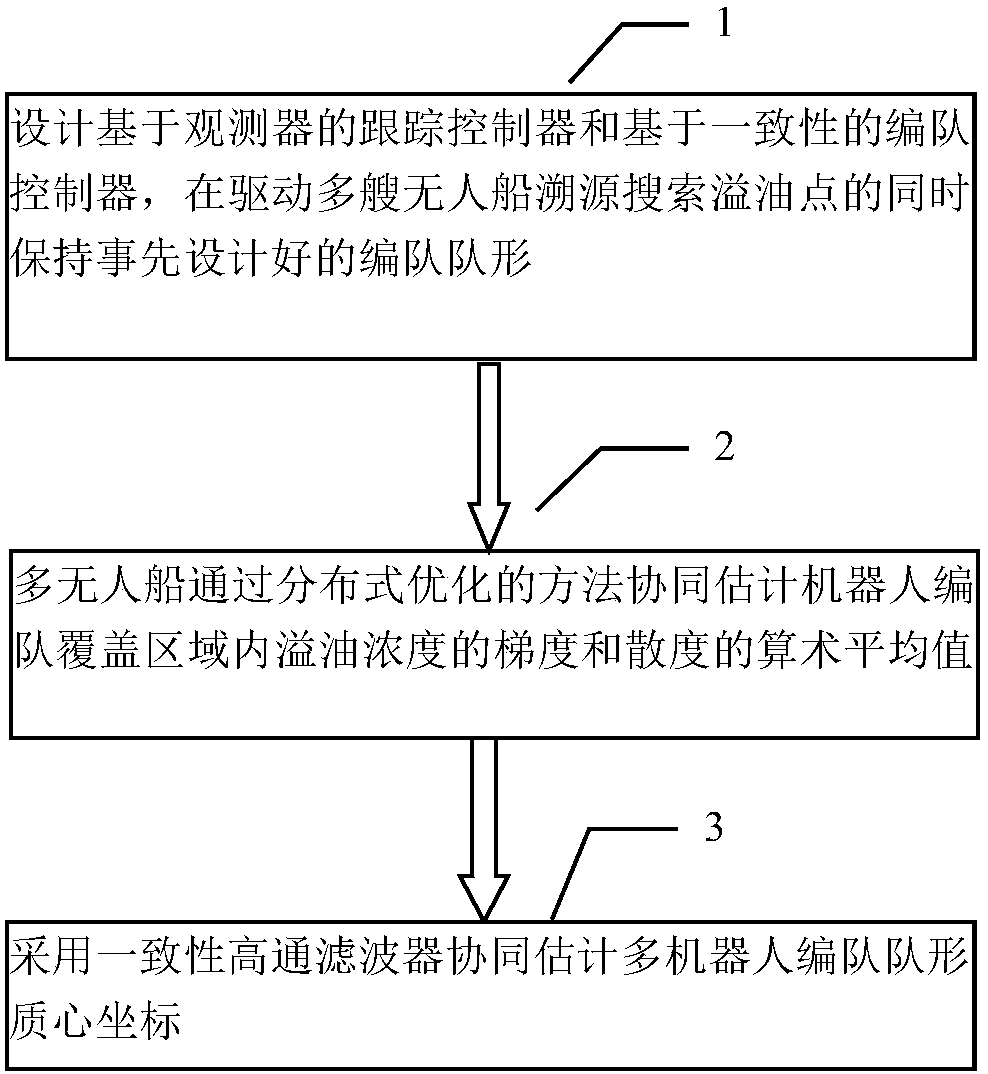
[0038] figure 1 A multi-robot formation traceability control method for sea oil spill is shown. First, an observer-based tracking controller and a consistency-based formation controller are designed to drive multiple unmanned ships to search for oil spill points while maintaining The formation formation is designed in advance; then, multiple unmanned ships jointly estimate the arithmetic mean of the gradient and divergence of the oil spill concentration in the area covered by the robot formation through a distributed optimization method; finally, the consensus high-pass filter is used to jointly estimate Multi-robot formation formation centroid coordinates.
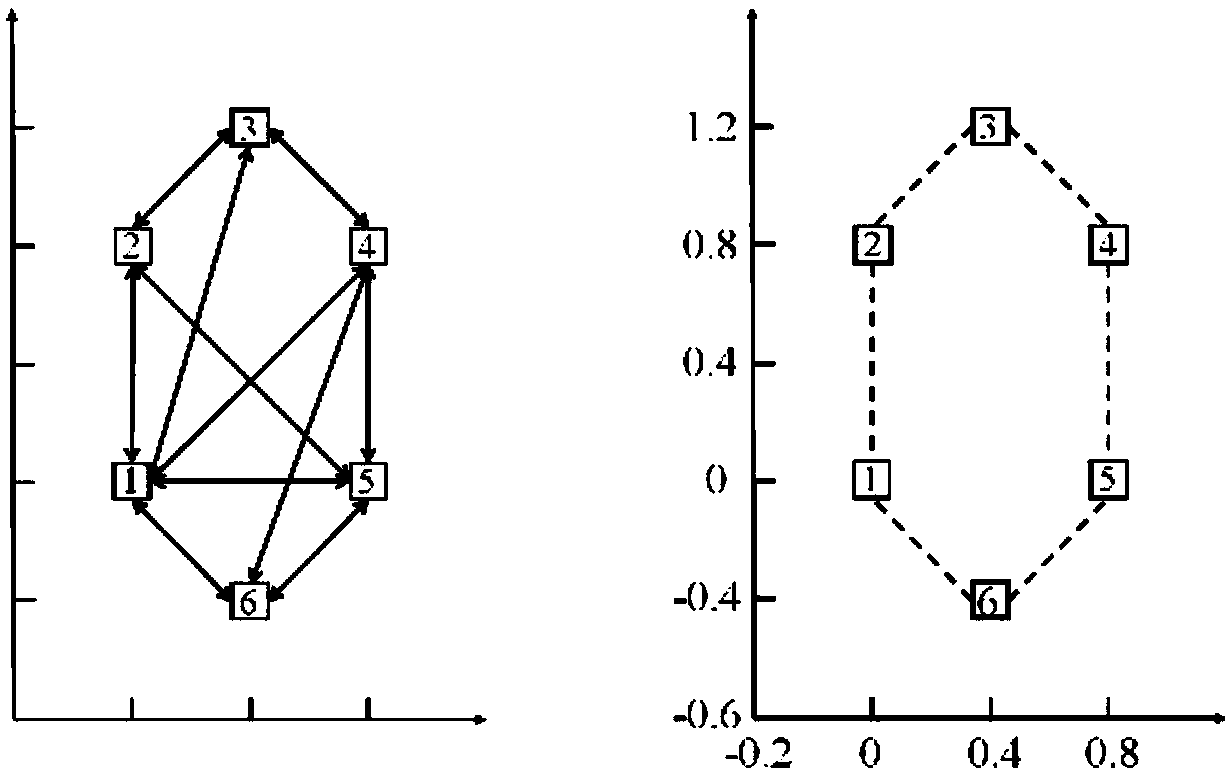
[0039] figure 2 The multi-unmanned ship communication topology and formation topology of the present invention are shown. Firstly, an observer-based tracking controller and a consistency-based formation control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More