

Single-degree-of-freedom energy storage and release integrated bionic jumping mechanism
A degree of freedom, crank-rocker mechanism technology, applied in the field of jumping robots, can solve the problems of heavy weight, short contact time, lack of practicality, etc., and achieve the effect of high energy utilization rate, simple control, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
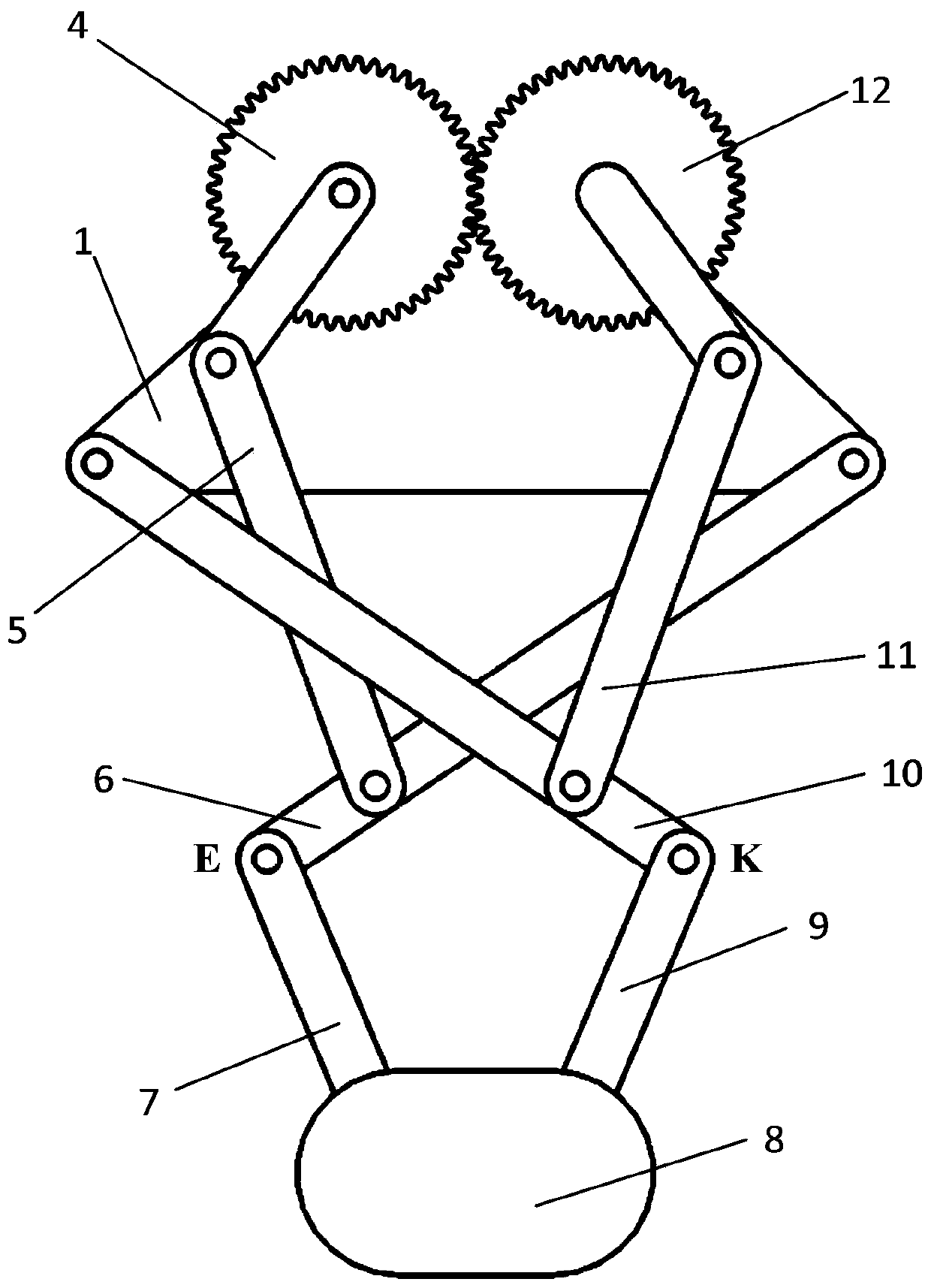
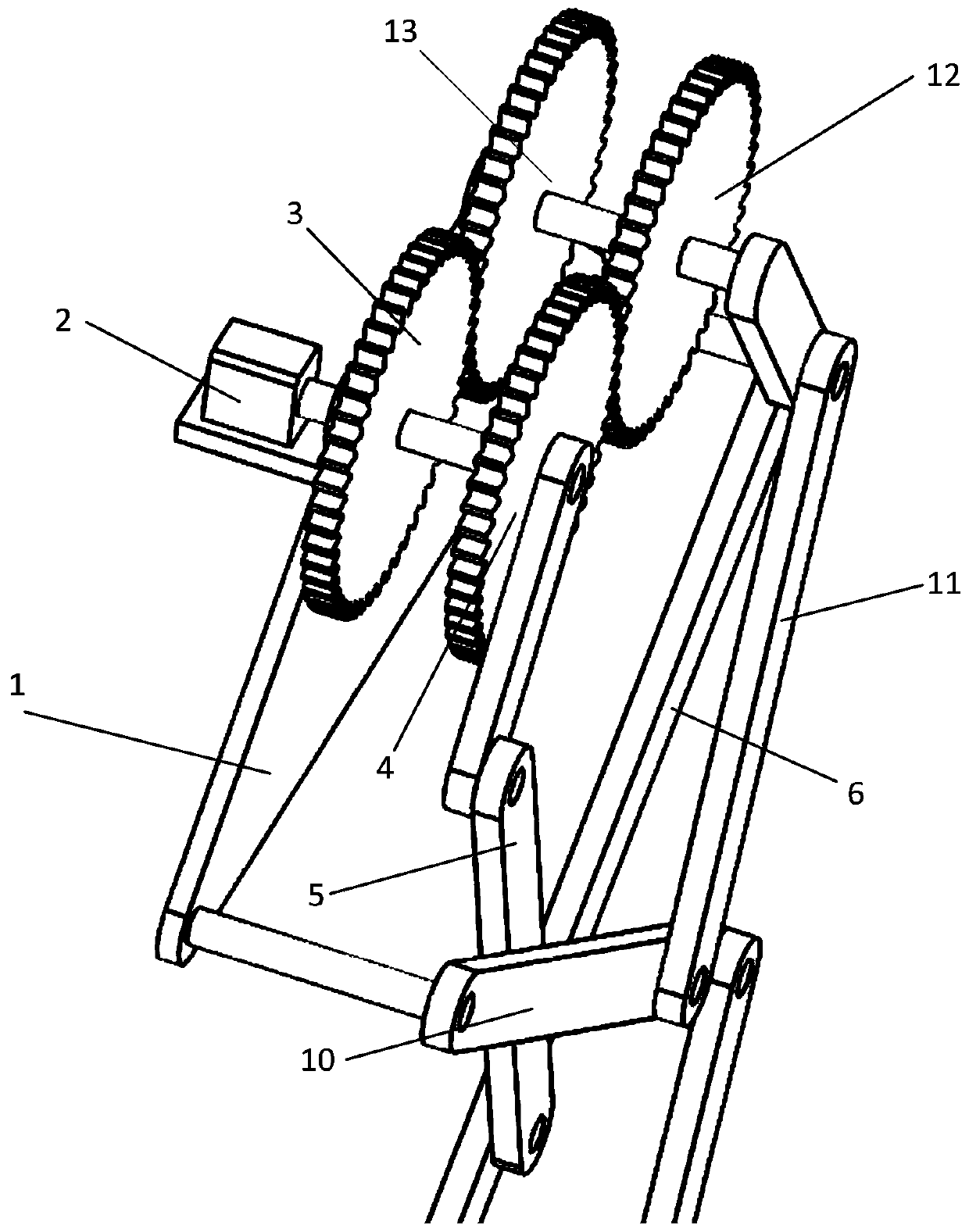
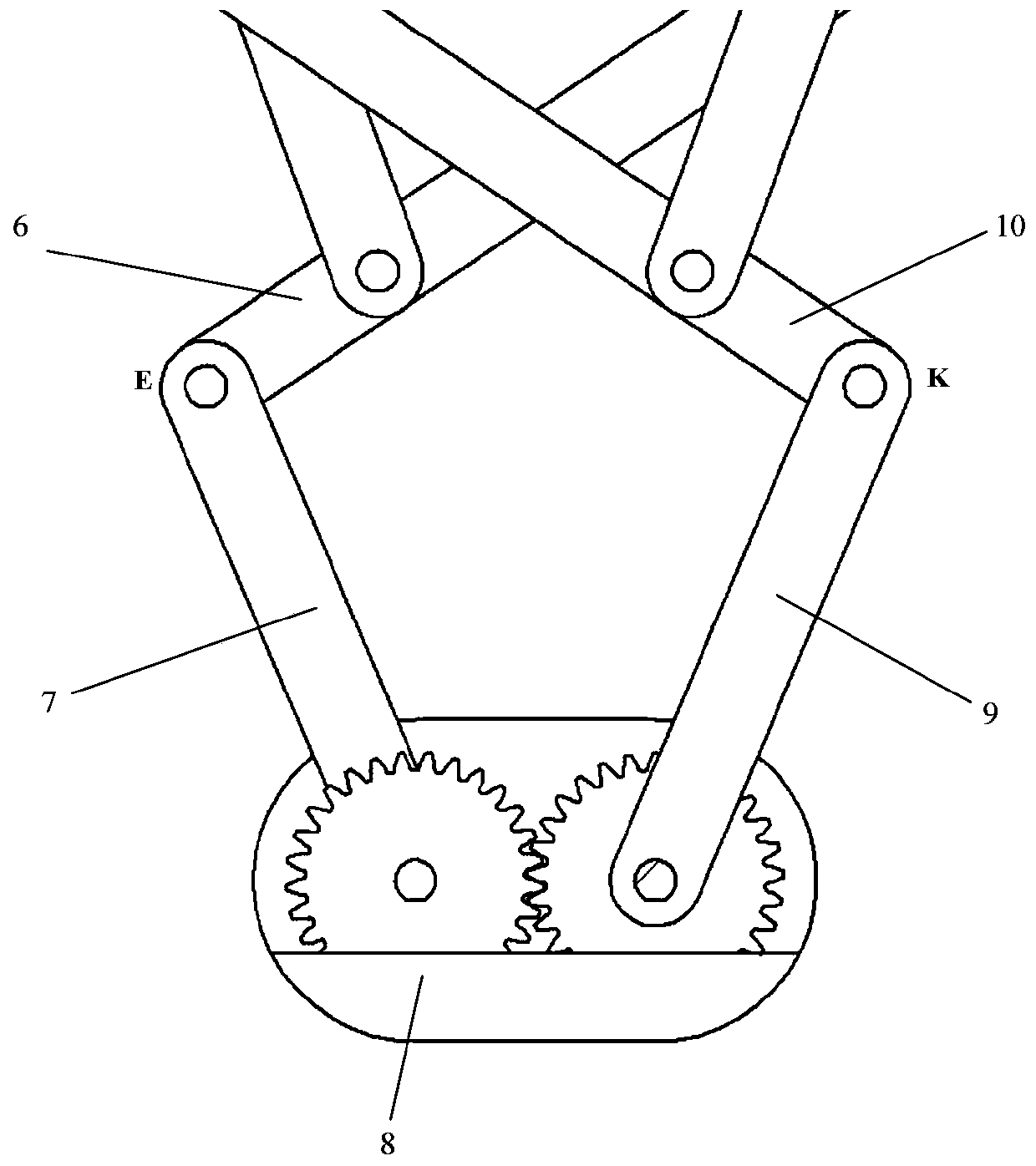
[0015] figure 1 It is a structural schematic diagram of the present invention, as shown in the figure, the single-degree-of-freedom energy storage and release integrated bionic jumping mechanism of this embodiment includes a frame 1, a driving motor 2, a first crank-rocker mechanism, and a second crank-rocker mechanism , the first elastic torsion assembly, the second elastic torsion assembly, the first gear rod 7, the second gear rod 9 and the base 8; the drive motor 2 is respectively driven by the first elastic torsion assembly and the second elastic torsion assembly The cranks of the first crank and rocker mechanism and the second crank and rocker mechanism rotate in opposite directions, that is, the drive motor 2 drives the crank of the first crank and rocker mechanism to rotate through the first elastic torsion assembly; the drive motor 2 rotates through the second elastic torsion The assembly drives the crank of the second crank-rocker mechanism to rotate, wherein the ela...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More