

Integrated robot joint module
A technology of robot joints and joints, which is applied in the field of machinery, can solve problems such as single working environment, low load-to-weight ratio, robot damage, etc., and achieve the effects of simplifying the transmission structure, saving structural space, and compact internal structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
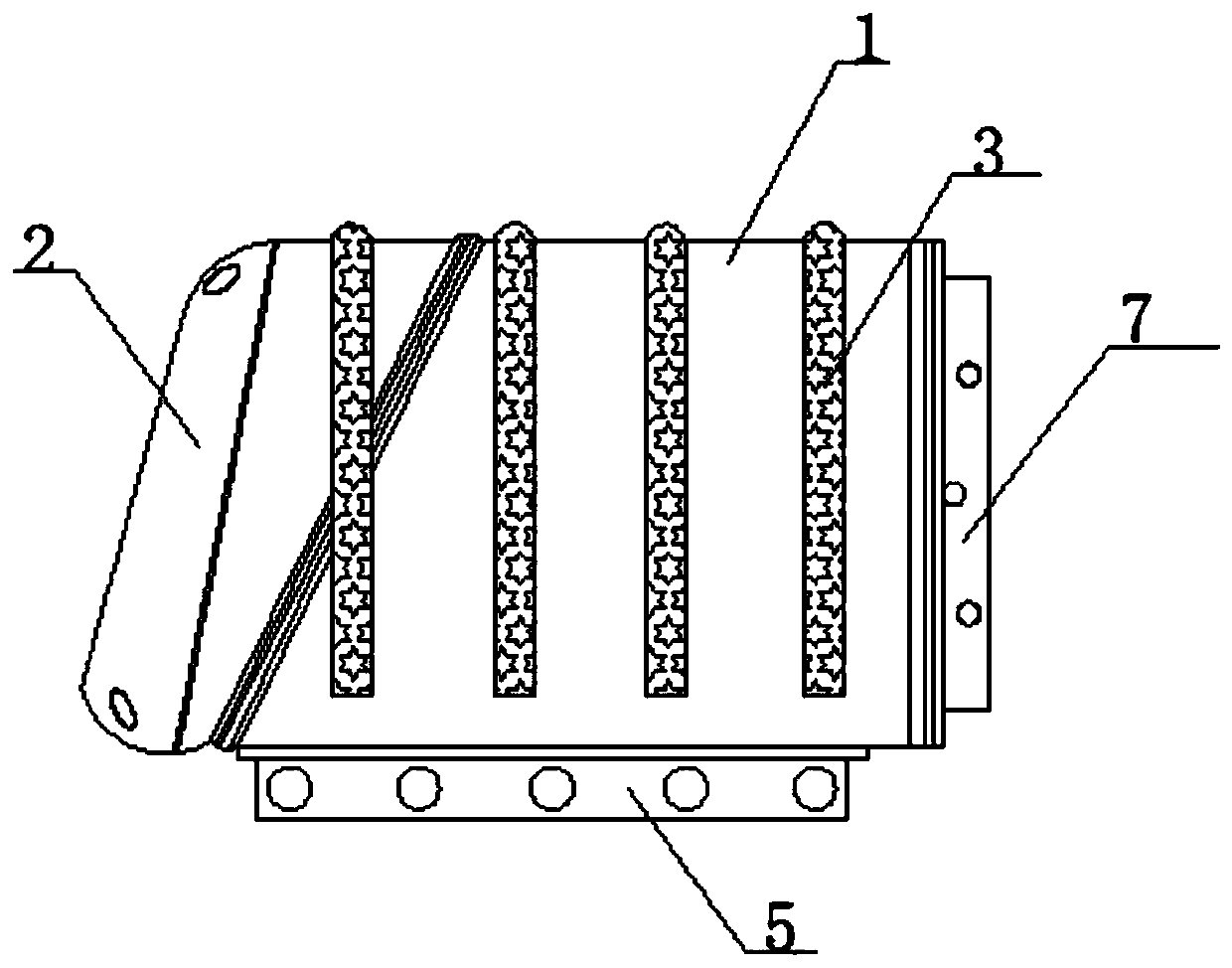
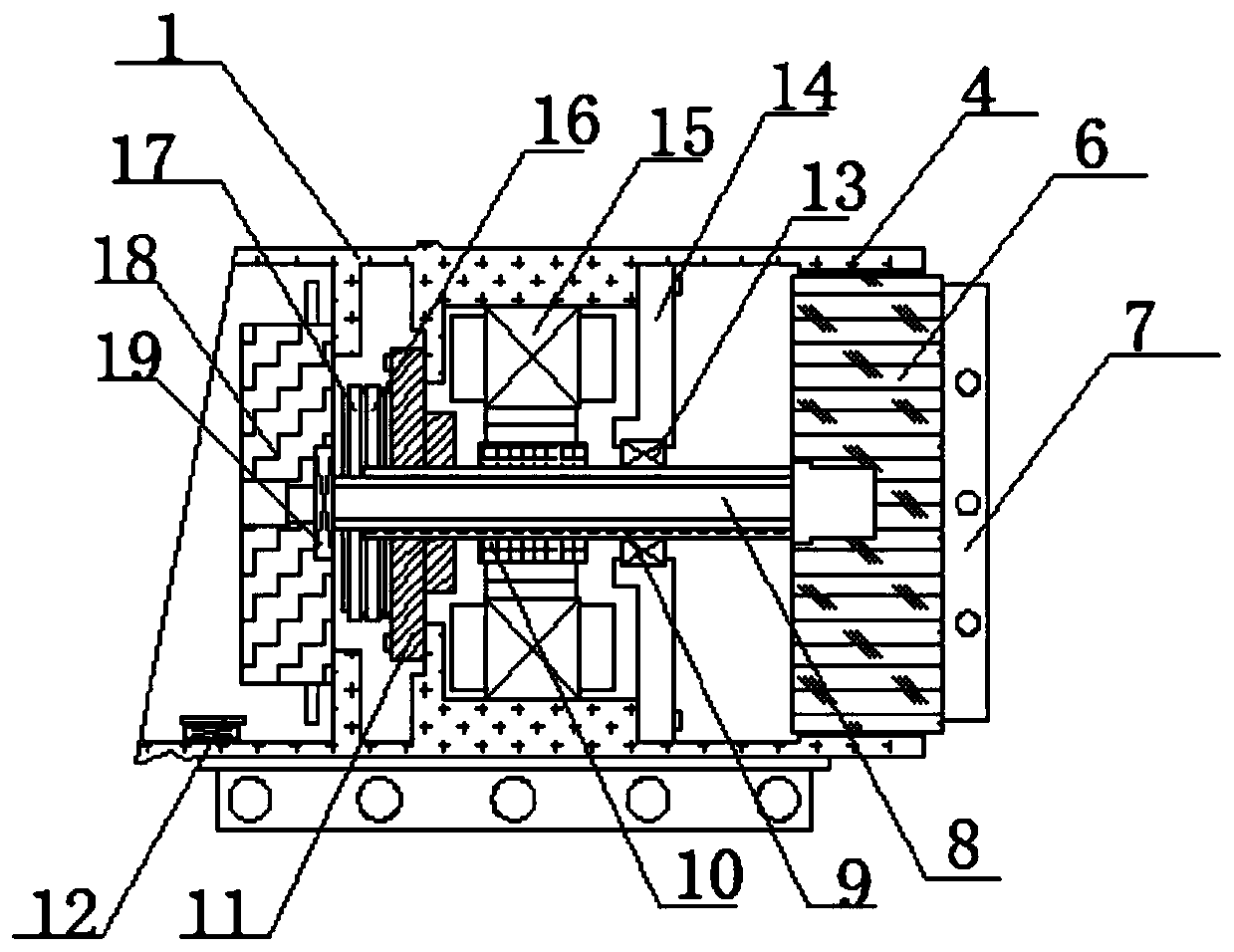
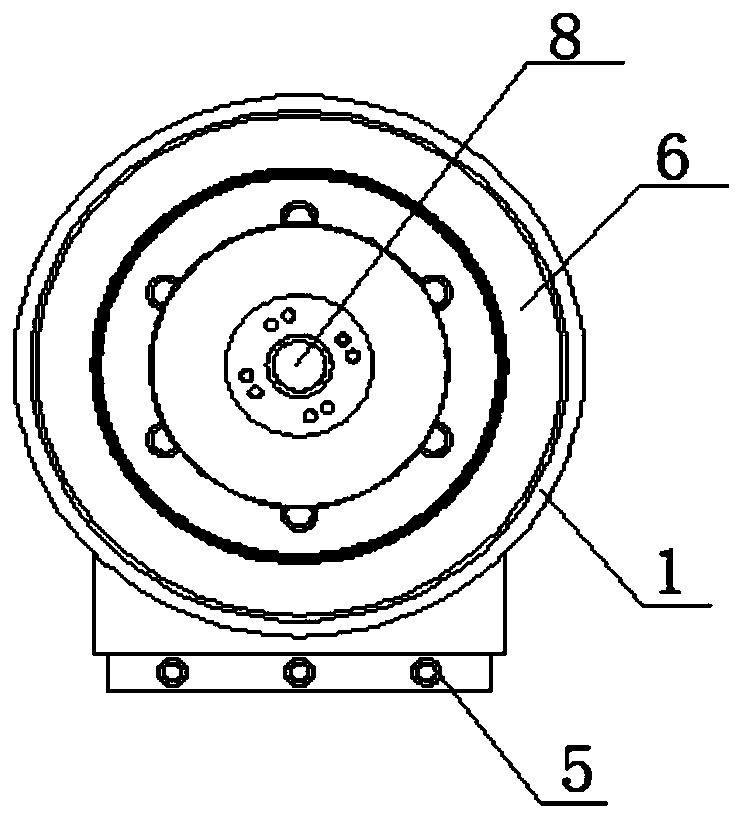
[0041] like Figure 1-5 As shown, an integrated robot joint module includes a joint housing 1 and an end cover 2. A frameless motor 15 is installed in the joint housing 1 through an annular slot, and a rotor 10 is provided in the frameless motor 15. The A low-voltage motor driver 18 is mounted on one side of the frameless motor 15 through fastening bolts, and a bearing seat 14 is installed on the other side of the frameless motor 15 through fastening bolts, and the hollow input shaft 9 is installed in the bearing seat 14 through the No. 1 bearing 13, And the hollow input shaft 9 is sleeved in the rotor 10, one end of the hollow input shaft 9 is fixedly connected to the harmonic reducer 6, and the harmonic reducer 6 is located at the end of the joint housing 1, and the harmonic reducer 6 is a The side output end is fixedly connected to the joint output disc 7, and one end of the joint output disc 7 is welded with a hollow output shaft 8, and one side of the low-voltage motor dr...
Embodiment 2
[0066] like Figure 1-5 As shown, an integrated robot joint module includes a joint housing 1 and an end cover 2. A frameless motor 15 is installed in the joint housing 1 through an annular slot, and a rotor 10 is provided in the frameless motor 15. The A low-voltage motor driver 18 is mounted on one side of the frameless motor 15 through fastening bolts, and a bearing seat 14 is installed on the other side of the frameless motor 15 through fastening bolts, and the hollow input shaft 9 is installed in the bearing seat 14 through the No. 1 bearing 13, And the hollow input shaft 9 is sleeved in the rotor 10, one end of the hollow input shaft 9 is fixedly connected to the harmonic reducer 6, and the harmonic reducer 6 is located at the end of the joint housing 1, and the harmonic reducer 6 is a The side output end is fixedly connected to the joint output disc 7, and one end of the joint output disc 7 is welded with a hollow output shaft 8, and one side of the low-voltage motor dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More