

Mechanical arm autonomous robust singularity avoidance method for improving path tracking performance
A technology of path tracking and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as unanalyzed and reduced path tracking performance, and achieve robust results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
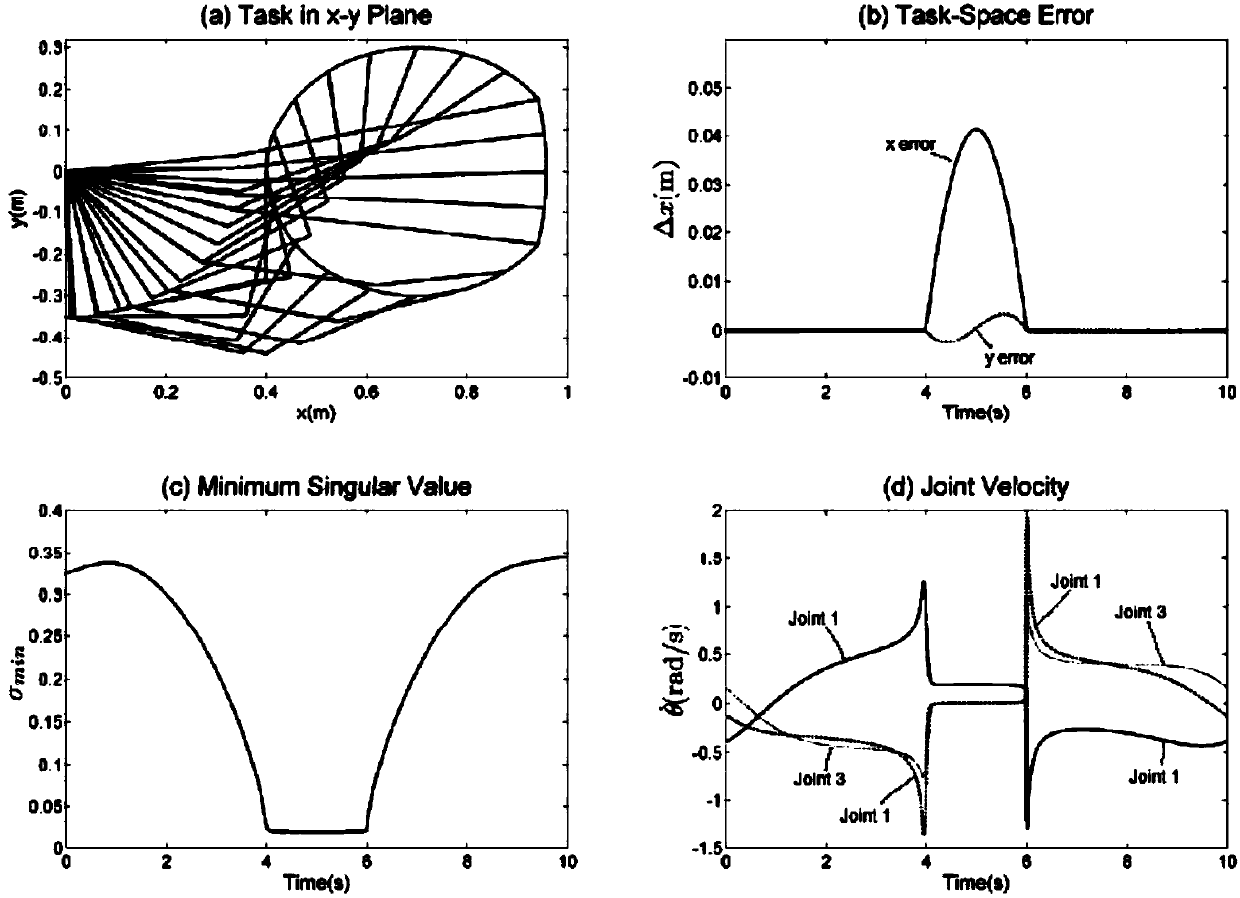
[0075] Single-task avoidance: the desired task in this embodiment is to track a circle in the workspace, and the time is 10s.
[0076] where α 0 =20,σ if =0.05,σ uf =0.02, K=diag(100,100) is used as the adjustment parameter, and the simulation that uses the STR method of the present invention to obtain is as figure 2 shown.
[0077] figure 2 It shows the simulation results of a 3-DOF planar manipulator tracking a circular trajectory in the task space using the STR method of the present invention. Figure (a) shows the tracking in the x-y plane, Figure (b) shows the tracking error in the task space, Figure (c) shows the variation curve of the minimum singular value during tracking, and Figure (d) shows the change of joint velocity curve. It can be seen that if the singularity avoidance strategy is not used, the singularity problem will occur between 4-5s. Using the STR method, the newly generated path effectively escapes the singularity area and ensures that the minimum ...
Embodiment 2
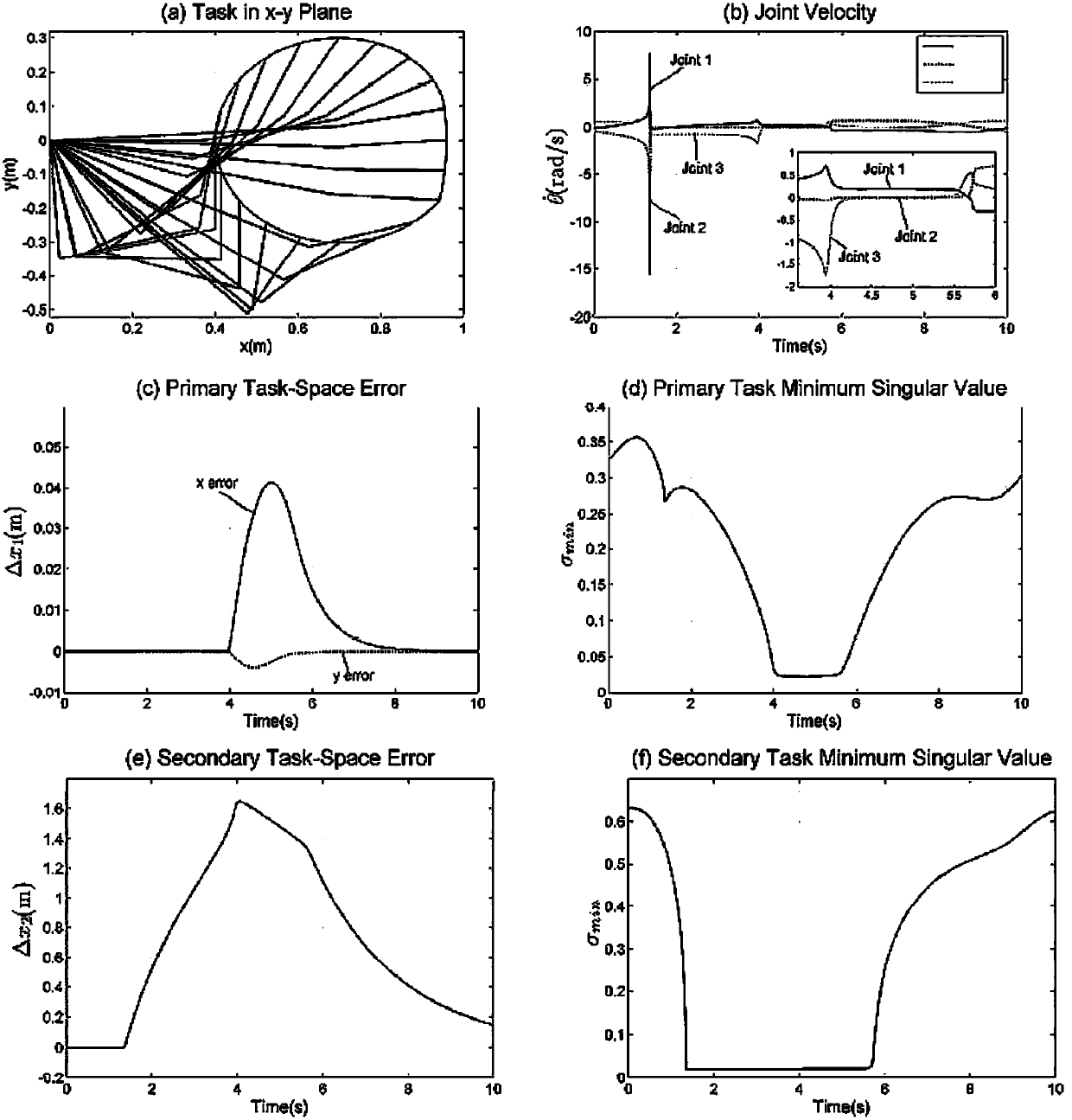
[0079] Multiple subtasks to avoid oddities: add a second task x 2 , keeping the orientation of the end effector at 90°, and verifying the robustness and singularity avoidance of the method for subtasks with task priorities.
[0080] The control parameter is K 1 =diag(1.5,1.5),K 2 =0.5; the obtained simulation results are as follows image 3 shown.
[0081] image 3The simulation results of a 3-DOF planar manipulator tracking a circular trajectory in task space while maintaining the orientation of the end-effector using the STR method are shown. Figure (a) shows the tracking in the x-y plane, Figure (b) shows the change curve of the joint velocity, Figure (c) shows the tracking error of the first task, Figure (d) shows the first task correlation during the tracking process The variation curve of the minimum singular value of the Jacobian matrix, figure (e) shows the tracking error of the second task, and figure (f) shows the variation curve of the minimum singular value of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More