

Global point cloud description method based on point cloud projection contour signature and distribution matrix
A distribution matrix and cloud projection technology, applied in the field of pattern recognition, can solve problems such as mixed noise and achieve the effect of strong expressive ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
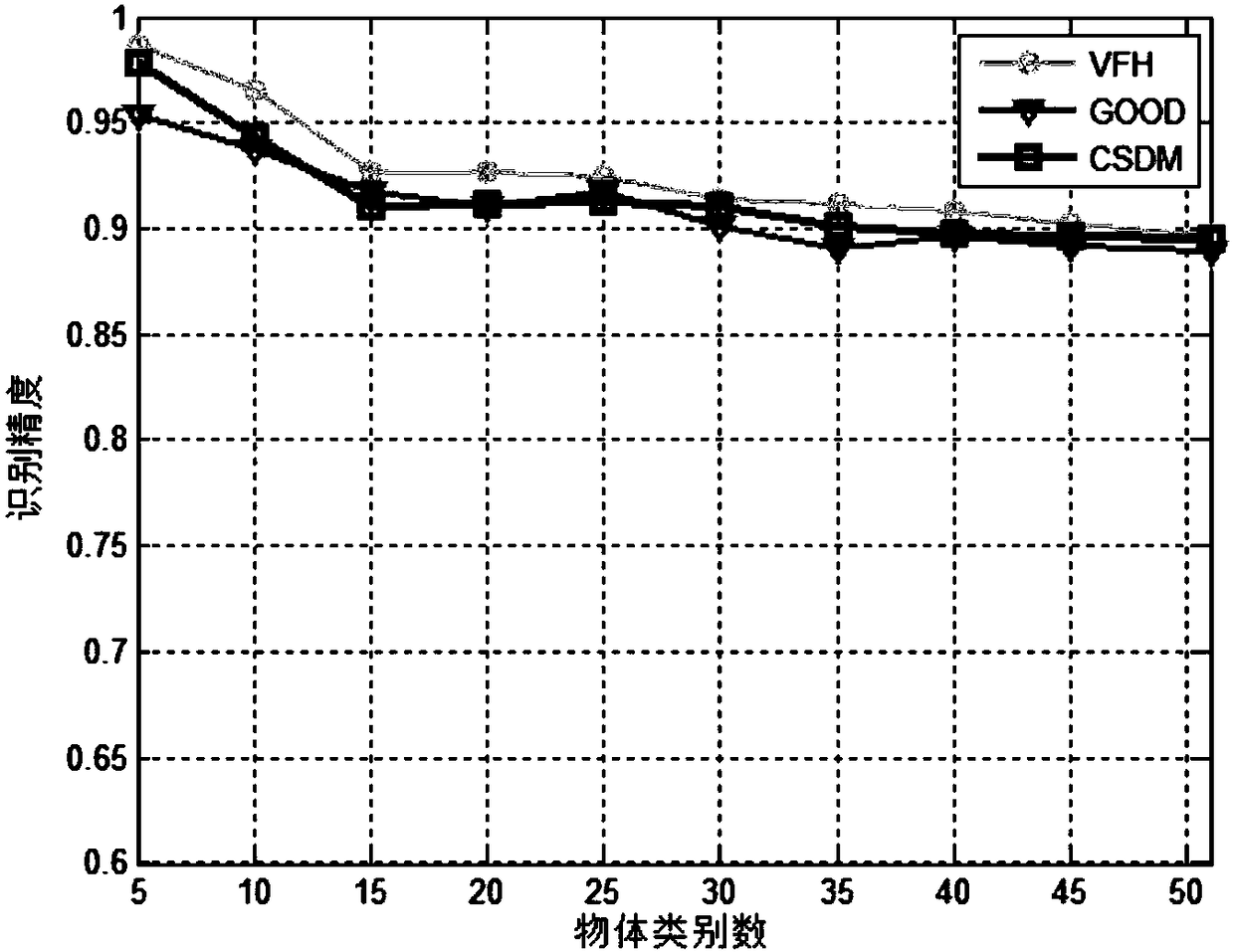
[0109] Embodiment 1 Evaluation of the recognition accuracy of the invention descriptor on the public data set
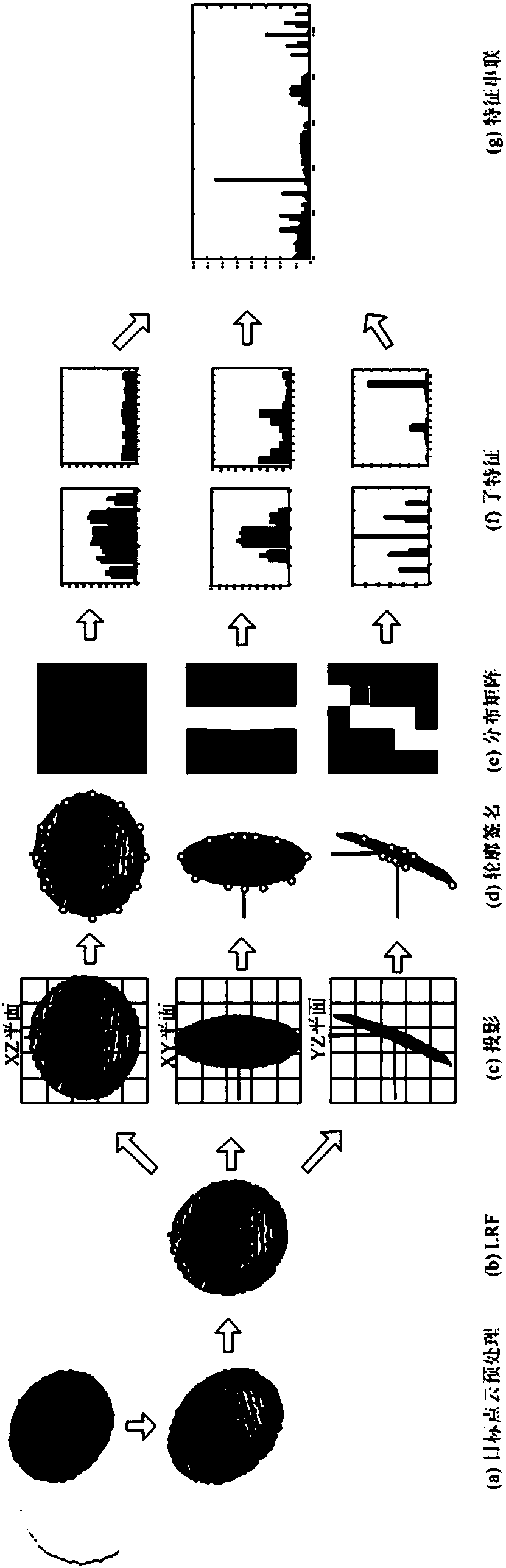
[0110] The global point cloud description method based on the point cloud projection contour signature and distribution matrix provided by the present invention includes the following steps in order:
[0111] 1) Preprocessing stage
[0112] 1-1) Map the depth image into 3D point cloud data. In this embodiment, the Washington RGB-D ObjectDataset (http: / / rgbd-dataset.cs.washington.edu / ) is used as the test data set, which provides the depth of different viewing angles corresponding to 300 common household daily necessities in 51 categories image set.
[0113] Such as figure 1 As shown, taking the plate_1_4_236_crop.png in the data set as an example, it shows the schematic process of generating the corresponding CSDM descriptor. First, use the interface function depthToCloud provided by the data set to convert the depth image into 3D point cloud data. For any point ...
Embodiment 2
[0147] Embodiment 2 Invention Descriptor Robustness Evaluation to Noise
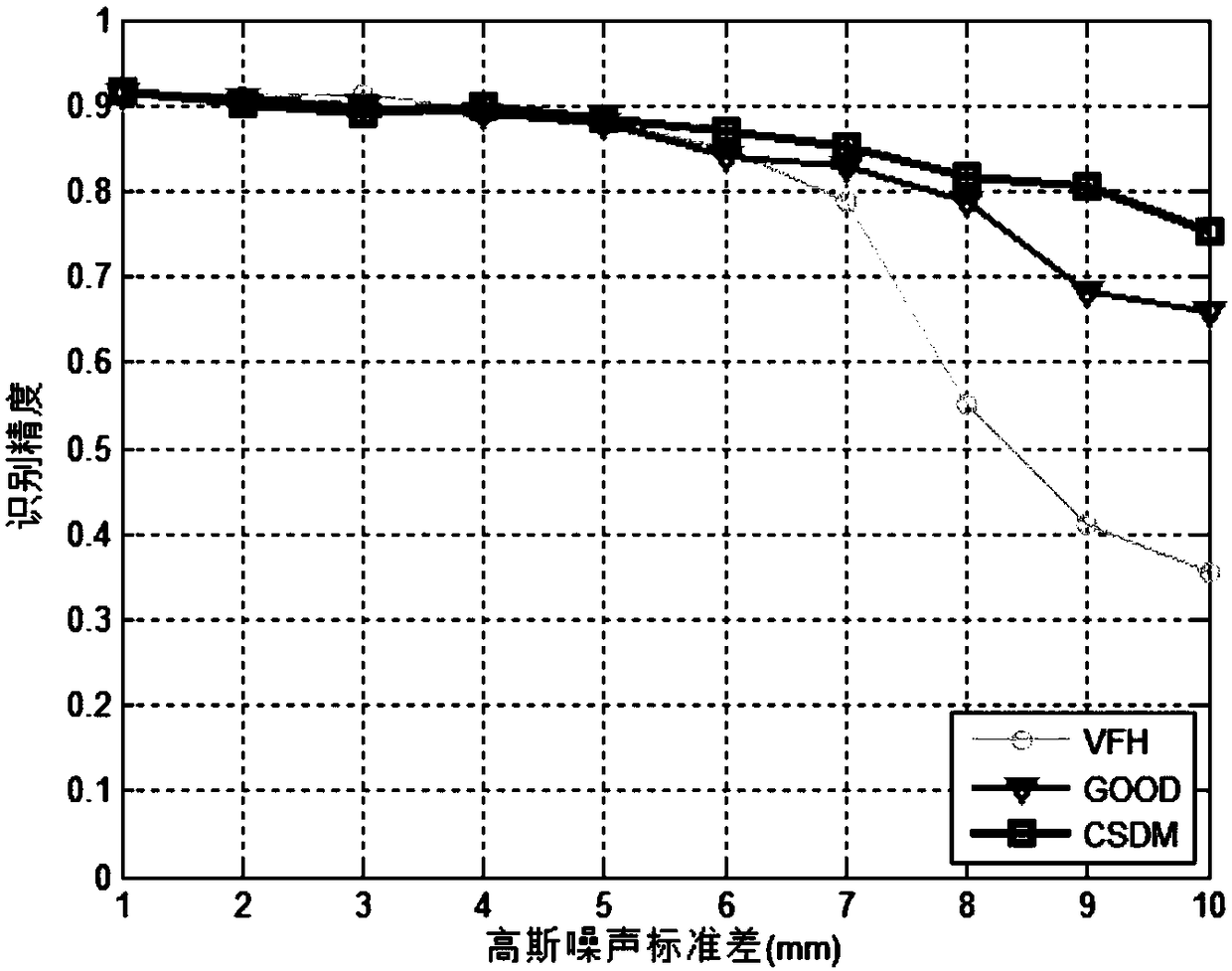
[0148] In order to evaluate the robustness of the global point cloud descriptor proposed by the present invention to noise, 10 groups of noise test experiments were designed:
[0149] Add different levels of Gaussian noise to each point in the target point cloud in the data set in its three coordinate directions, and the standard deviations of the corresponding noise are 1, 2, 3, 4, 5, 6, 7, 8, 9 and 10, the unit is mm. The corresponding result is as image 3 shown.
Embodiment 3
[0150] Example 3 Robustness Evaluation of Invented Descriptors to Point Cloud Density Changes
[0151] In order to evaluate the robustness of the global descriptor proposed by the present invention to point cloud density changes, five sets of test experiments were designed: using the VoxelGrid filter provided in the point cloud library PCL (http: / / pointclouds.org / documentation / tutorials / voxel_grid.php) performs different degrees of downsampling on the target point cloud. The VoxelGrid filter achieves different degrees of downsampling by controlling the size of the Voxel. Five sets of design experiments use Voxel sizes of 1mm, 5mm, 10mm, 15mm and 20mm. The corresponding experimental results are as Figure 4 shown.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More