

Underwater autonomous robot fixed depth control method based on reinforcement learning
An autonomous robot, fixed depth technology, applied in the direction of height or depth control, adaptive control, general control system, etc., can solve problems such as no application of reinforcement learning control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] A method for controlling the fixed depth of an underwater autonomous robot based on reinforcement learning proposed by the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
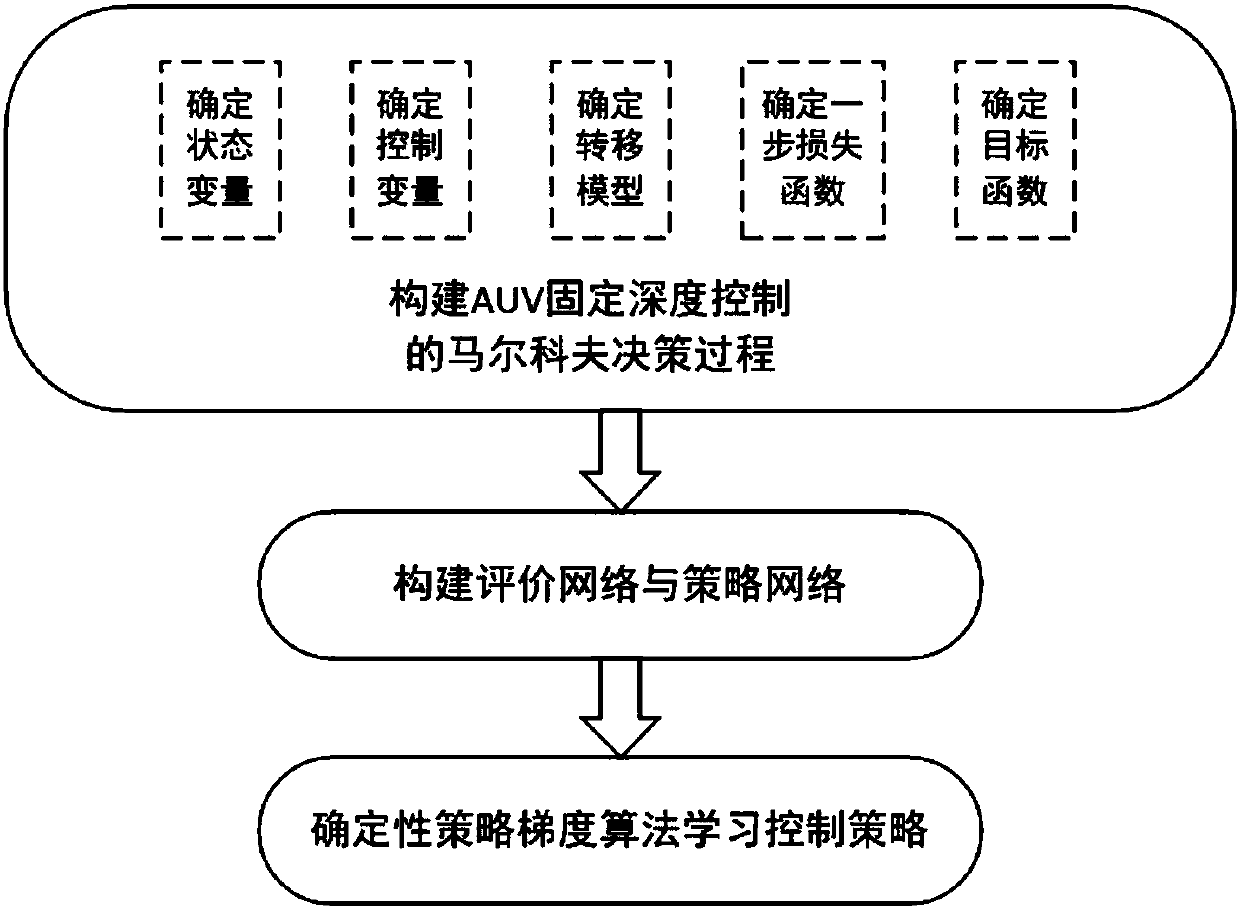
[0085] The present invention proposes a method for controlling a fixed depth of an underwater autonomous robot based on reinforcement learning. The deterministic strategy gradient method is applied to the method for controlling a fixed depth of an AUV, and an artificial neural network with a suitable structure is designed for the AUV control problem. Deterministic policy gradient is a reinforcement learning approach to continuous action spaces that assumes a deterministic policy function and updates the policy along the gradient direction that maximizes the long-term loss function. The present invention focuses on the control problem of AUV fixed depth, and specifically describes how to design a control strategy to dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More