

A Fourth-Order Tensor Joint Diagonalization Algorithm for Joint Blind Source Separation of Four Datasets
A technology of joint diagonalization and blind source separation, applied in the field of fourth-order tensor joint diagonalization algorithm, which can solve the problem of insufficient algorithm accuracy, utilization of signal time domain characteristics, and failure to fully exploit high-order joint diagonalization. structural issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
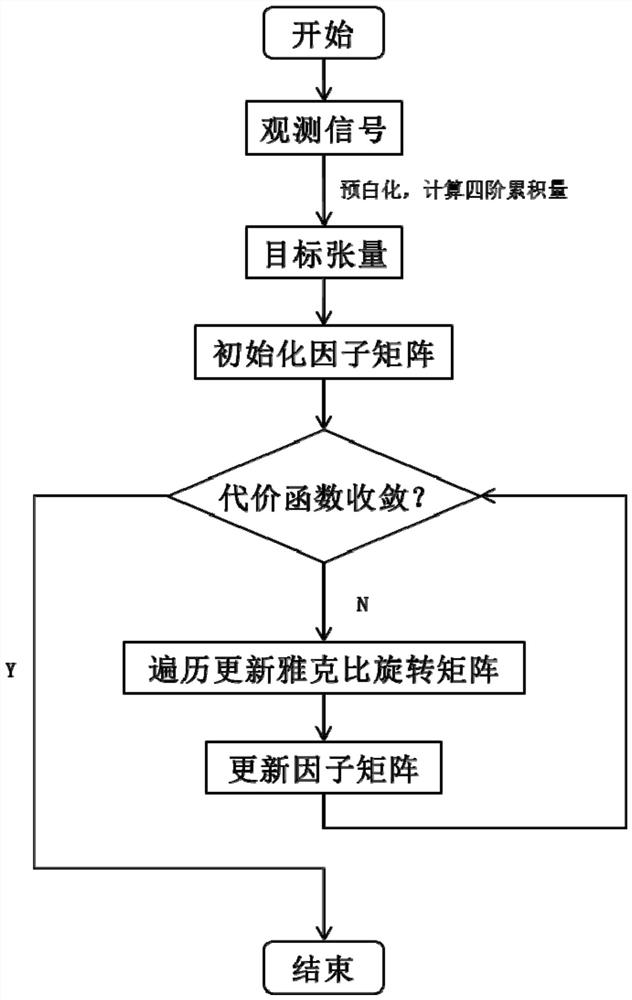
[0211]Example 1, Randomly generate super diagonal tensor Dk, And the unitary matrix U(1),U(2),U(3),U(4), And directly construct the tensor according to formula (4)
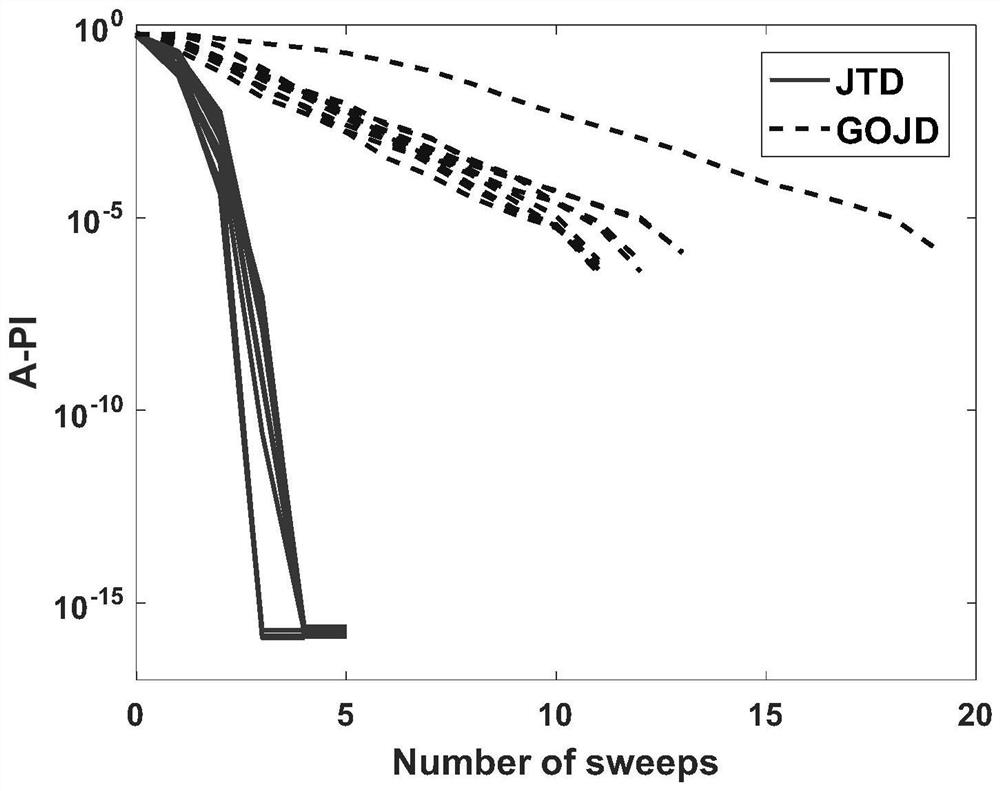
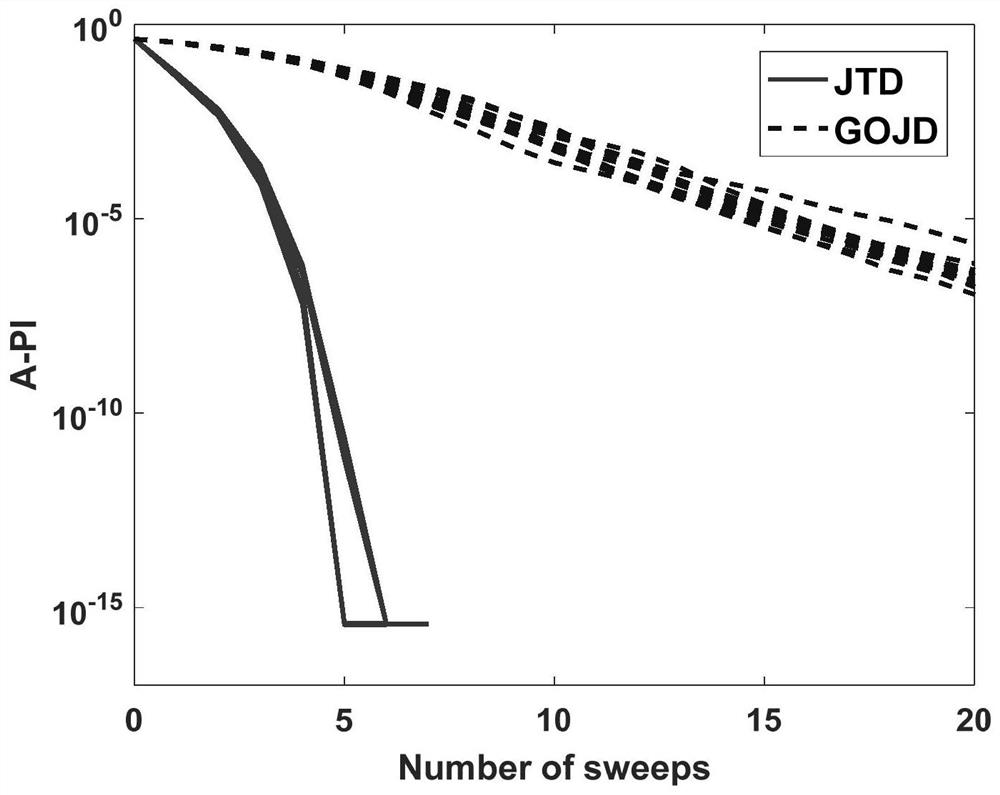
[0212]Algorithm performance is evaluated by the performance index (Performance Index: PI) defined by the following formula:
[0213]
[0214]among them,SuperscriptRepresents the Moore-Penrose pseudo-inverse. Calculate the PI of the separation results and then average them. The average PI (Average PI: A-PI) is used as the evaluation index of algorithm performance.
[0215]By calculating the PI value corresponding to the algorithm at the end of each scan, the convergence of the algorithm can be reflected. Figure 2-1 toFigure 2-4 When K and N take different values, the A-PI value of the JTD algorithm varies with the number of scans in 10 independent experiments.
[0216]For reference, we draw the A-PI curve of the generalized orthogonal matrix diagonalization algorithm (GOJD, [8]) under the same conditions (its data matrix is defined b...
Embodiment 2
[0218]Embodiment 2. In this experiment, four sets of observation signals x are generated according to formula (1A)(m)(t),m=1,2,3,4:
[0219]
[0220]Where the mixed matrix A(m)∈ CN×R Randomly generated by the program, the noise term n(m)(t)∈CN×TGaussian white noise with zero mean unit variance.
[0221]The source signal is constructed by:
[0222]sr(t)=Qrs′r(t), (22)
[0223]among thems′r(t)∈C4It is a random phase signal of segmental amplitude modulation, and its phase and amplitude modulation coefficient are randomly generated by the program. Matrix Qr∈R4×4Randomly generated by the program and used to introduce correlations between sets. It is not difficult to know that the constructed source signal is a non-stationary non-Gaussian signal (assuming A3), and the source signals of different data sets satisfy the assumptions of inter-group correlation and intra-group independence (assuming A1, A2).
[0224]In formula (21), σsAnd σnRepresents signal strength and noise strength respectively. The signal-t...
Embodiment 3
[0239]In Embodiment 3, the experiment aims to extract the FECG signal from the actually collected observation data that mixes the mother ECG (MECG), the fetal ECG (Fetal ECG, FECG), and other interference signals.
[0240]The 8-channel ECG data used is taken from the DAISY database 0 of Leuven University. The signal waveform is asFigure 4 Shown. The sampling frequency is 250Hz, the number of sampling points is 2500, and the sampling time is 10s, such asFigure 4 Shown is the eight-channel ECG data actually collected, which is taken from the DAISY database of Leuven University.
[0241]According to the following formula, the eight observation signals are divided into four data sets, and each data set contains five observation signals:
[0242]
[0243]The observation signals of the four data sets are pre-whitened and segmented. Each segment has a length of L=500 and an overlap rate of α=0.5. It is not difficult to know that K=10 at this time. Calculate the mutual fourth-order cumulant for each s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More