

Method for reducing loss caused by accidental fall of unmanned aerial vehicle
A kind of unmanned aerial vehicle, unexpected technology, applied in the direction of unmanned aircraft, motor vehicles, aircraft control, etc., can solve the problems of unmanned aerial vehicle damage, lack of protection, economic loss of unmanned aerial vehicle holders, etc. Achieve good cushioning and shock absorption, avoid damage, and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
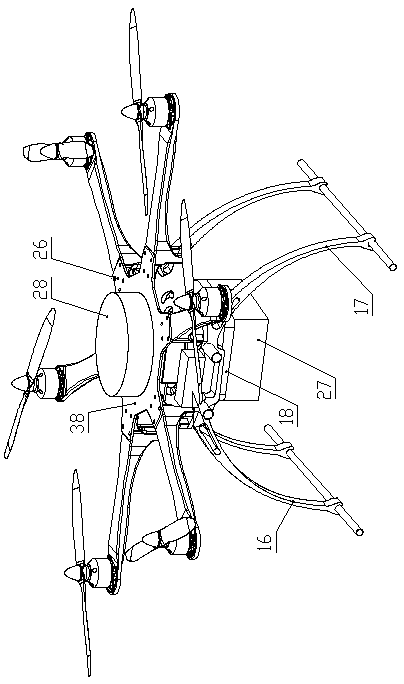
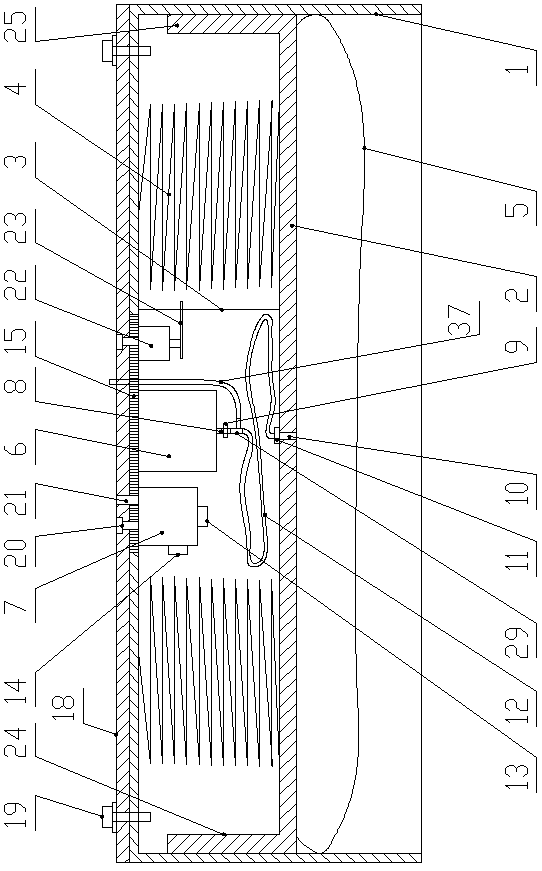
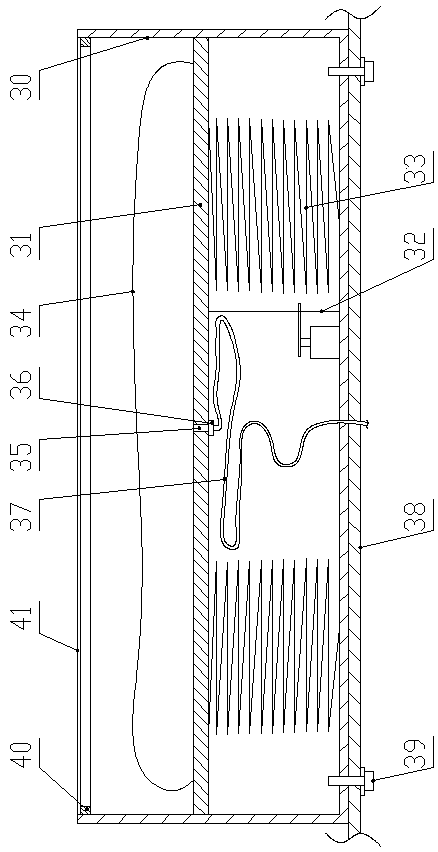
[0033] Such as figure 1 , figure 2 and image 3 As shown, in the method for reducing the loss caused by the accidental fall of the drone, the drone 26 includes the drone main body, the first landing gear 16, the second landing gear 17, the upper horizontal plate 38 and the lower horizontal plate 18. The flat plate 18 is fixedly arranged on the top of the first landing frame 16 and the second landing frame 17, and the main body of the drone is installed between the lower horizontal plate 18 and the upper horizontal plate 38;
[0034] The method of the present invention comprises the following steps:
[0035] (1) Install the upper buffer and shock absorption system 27 on the horizontal lower surface;
[0036] (2) Install the air flotation deceleration balance adjustment system 28 on the upper surface of the upper horizontal plate 38;
[0037] The shock absorbing system 27 includes a square box 1 with an open bottom. The square box 1 is located between the first landing gear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More