

A temporary obstacle handling method for laser slam navigation
A processing method and obstacle technology, which is applied in the factory environment and the field of temporary obstacle processing, can solve the problems of AGV shaking, unstable operation, and differential setting of processing strategies, so as to improve work efficiency and avoid start-stop and deceleration effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the technical solution of the present invention clearer and clearer, the following will be further described in detail with reference to the accompanying drawings. It should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the present invention.
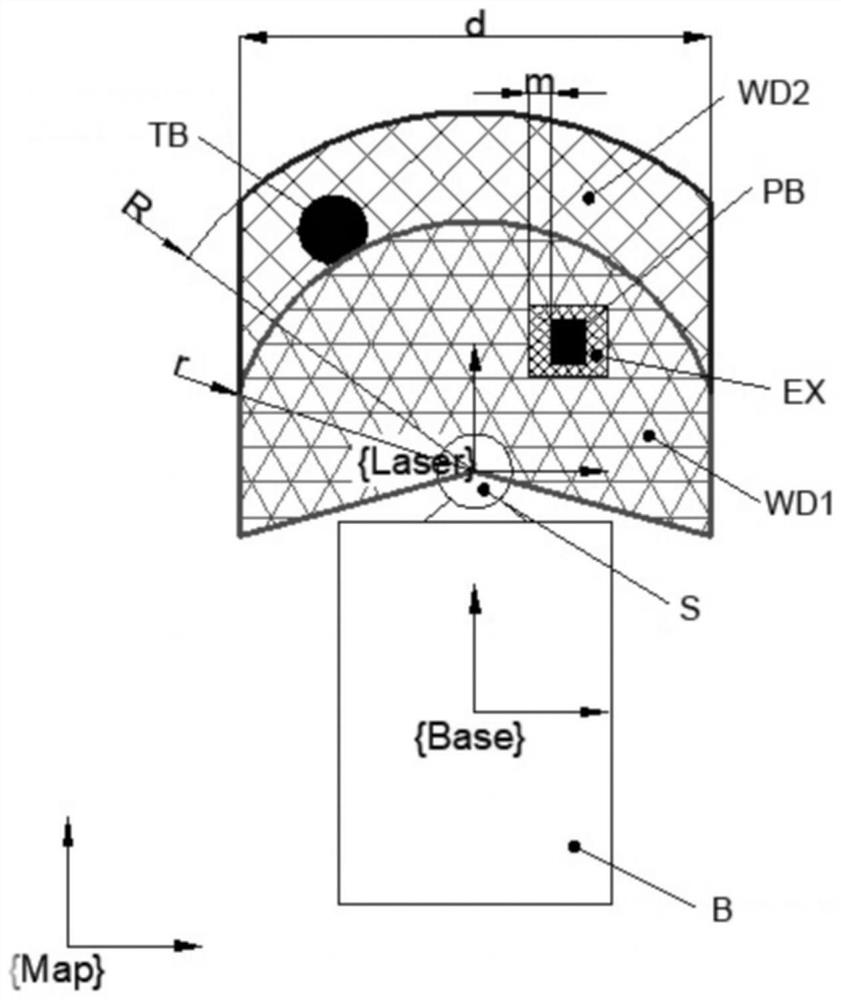
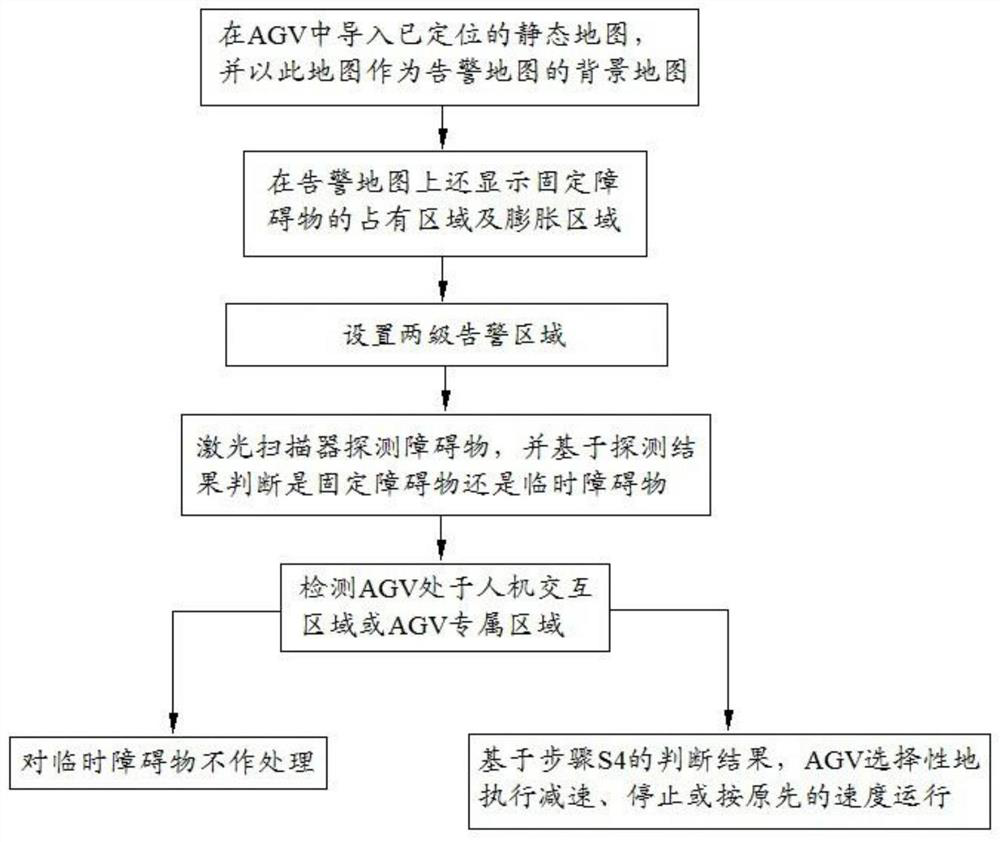
[0030] First import the positioned static map into the AGV, and use this map as the background map of the warning map. Any changes on this map will not affect the positioning. The AGV of the present invention adopts a laser scanner as a sensor, and forms the alarm map of the present invention with the laser scanner as the center.
[0031] Then, set the two-level warning area. The first-level warning area WD1 is a part of the circular area in front of the AGV with a radius r and width d centered on the laser scanner of the robot body B of the AGV. The second-level warning area WD2 is the laser scanner of the robot body B of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More