

A hydraulic circuit for active control of prosthetic knee-ankle joint motion
A joint motion and hydraulic circuit technology, applied in fluid pressure actuators, servo motors, servo motor components, etc., can solve problems such as mismatching motion trajectories of amputee patients, and achieve improved battery life, reduced power consumption, and reduced peak power required effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
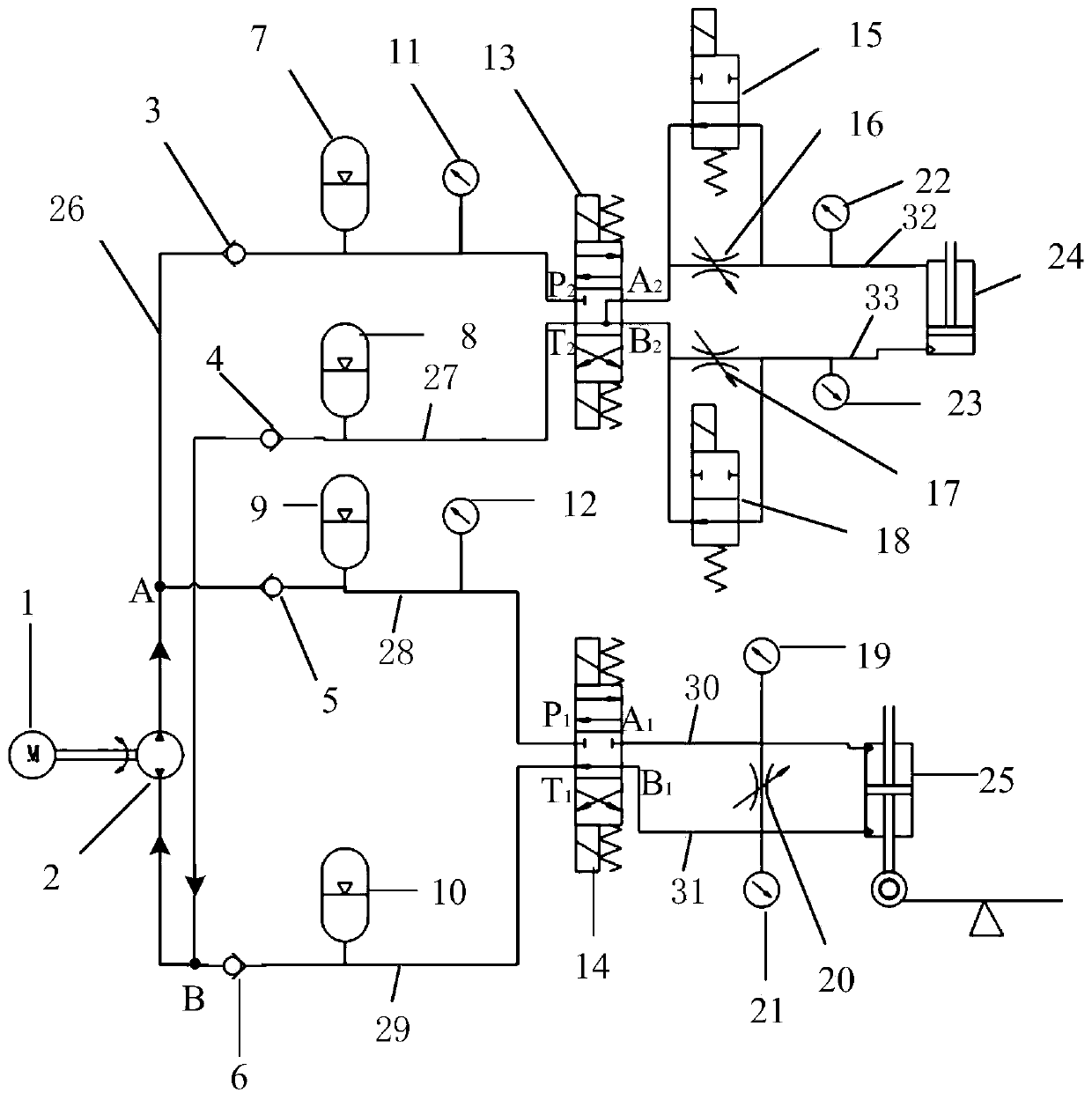
[0039] In the present invention, the hydraulic pump 2 is a plunger hydraulic pump (HYC-MP1F1B / A), the hydraulic pump 2 is controlled by a motor 1 (brushless DC motor 60BLF993000), and the hydraulic circuit is controlled by controlling two three-position four-way valves. Switch between four working states. During the whole process, the electric motor 1 and the hydraulic pump 2 are always in working state, suck oil from the second accumulator 10 through the first one-way valve 5 and the second one-way valve 6, and charge the first accumulator 9 with oil; Oil is sucked from the fourth accumulator 8 through the third check valve 3 and the fourth check valve 4 , and the third accumulator 7 is charged with oil.
[0040] (1) State 1 corresponds to the HS (Heel Strike) process of the human walking cycle, such as figure 1 , for the ankle joint, the first three-position four-way valve 14 is in the neutral position at this time, and the bypass damping valve 20 is connected to the upper ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More