

Six-axis robot
A six-axis robot and rotating shaft technology, applied in the field of robotics, can solve the problem that the robot cannot meet the needs of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can understand the present invention more clearly, but the protection scope of the present invention is not limited thereby.
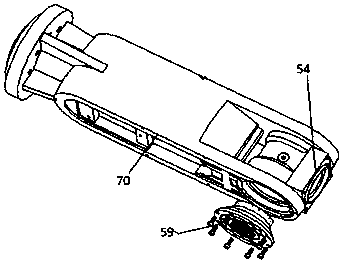
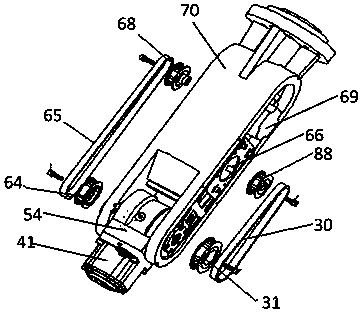
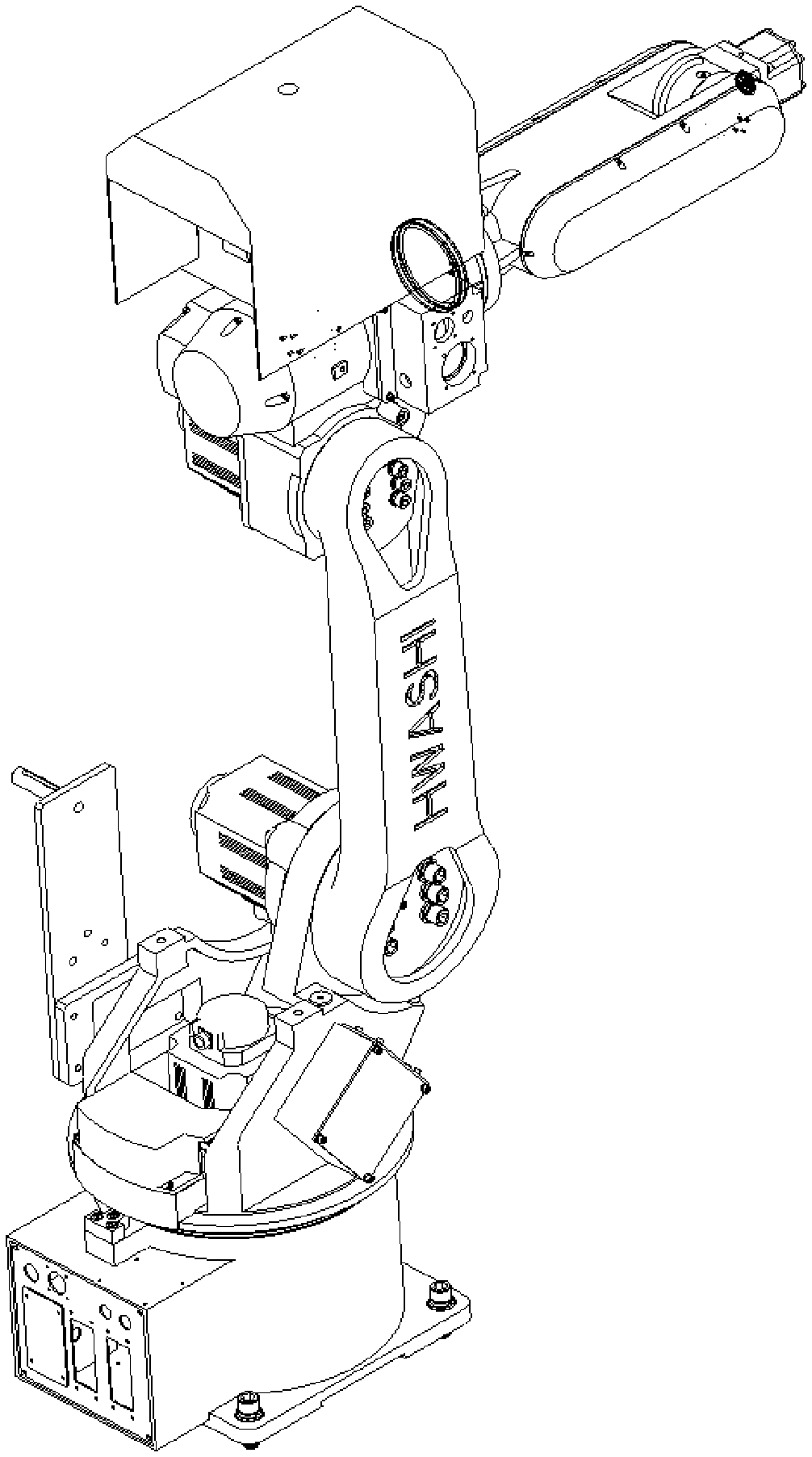
[0049] Please also combine the appended figure 1 To attach Figure 19 Understand the overall scheme of the invention. For the convenience of clearly showing each part of the present invention, attached figure 2 An exploded exploded view of the robot as a whole is given, with image 3 And attached Figure 4 For each part in the exploded diagram, a specific enlarged structural diagram is given, with Figure 5 further given image 3 And attached Figure 4 connection diagram. As shown in the accompanying drawings, the six-axis robot of the present invention, that is, the 6-joint robot, consists of a robot body, a control cabinet and a teaching box connected by lines to form a worki...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More