

Two-axis and three-axis pan-tilts and shooting equipment thereof
A technology of two-axis gimbal and pin shaft, which can be used in mechanical equipment, machine/bracket, optics, etc., and can solve problems such as large size of gimbal.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
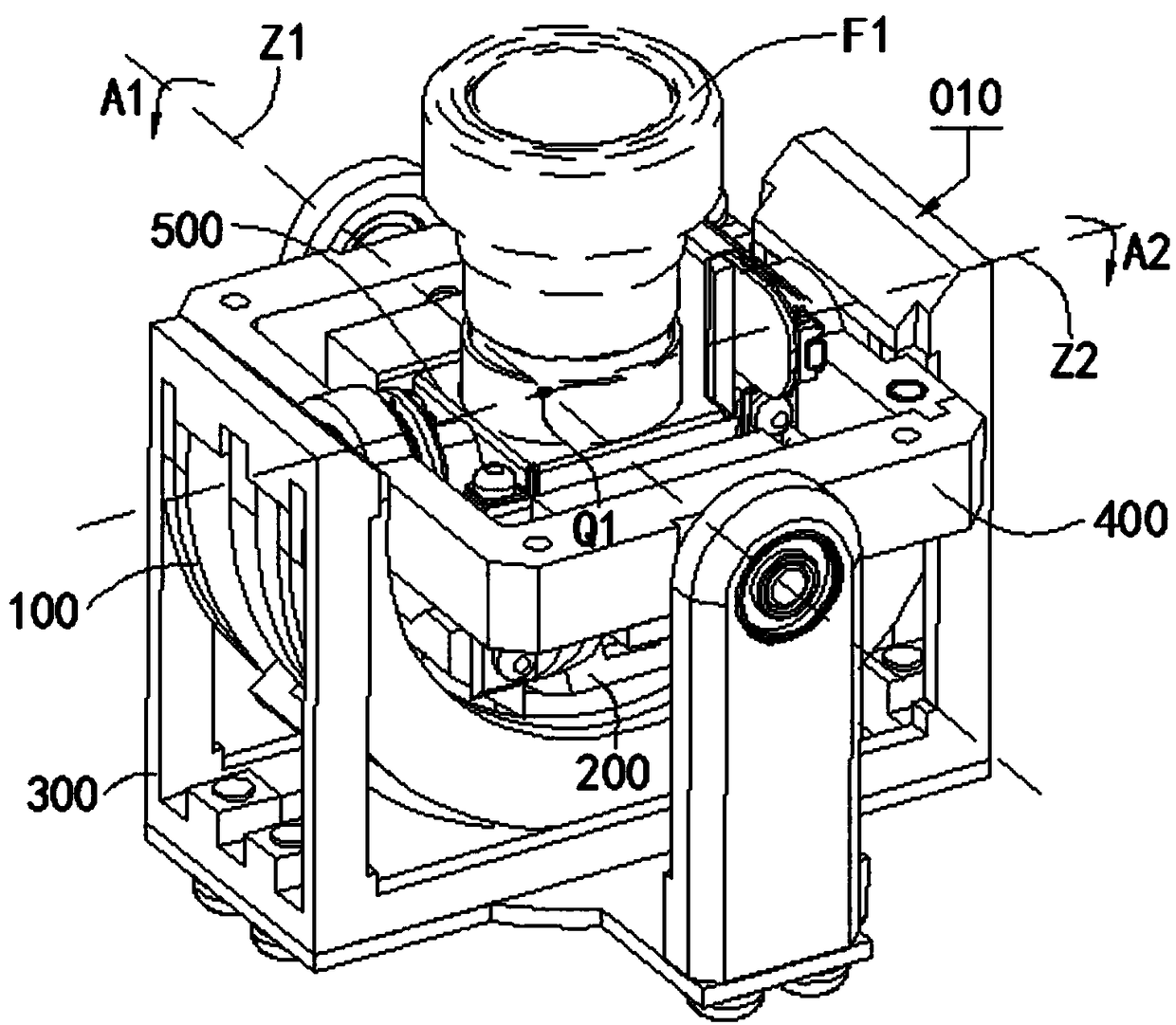
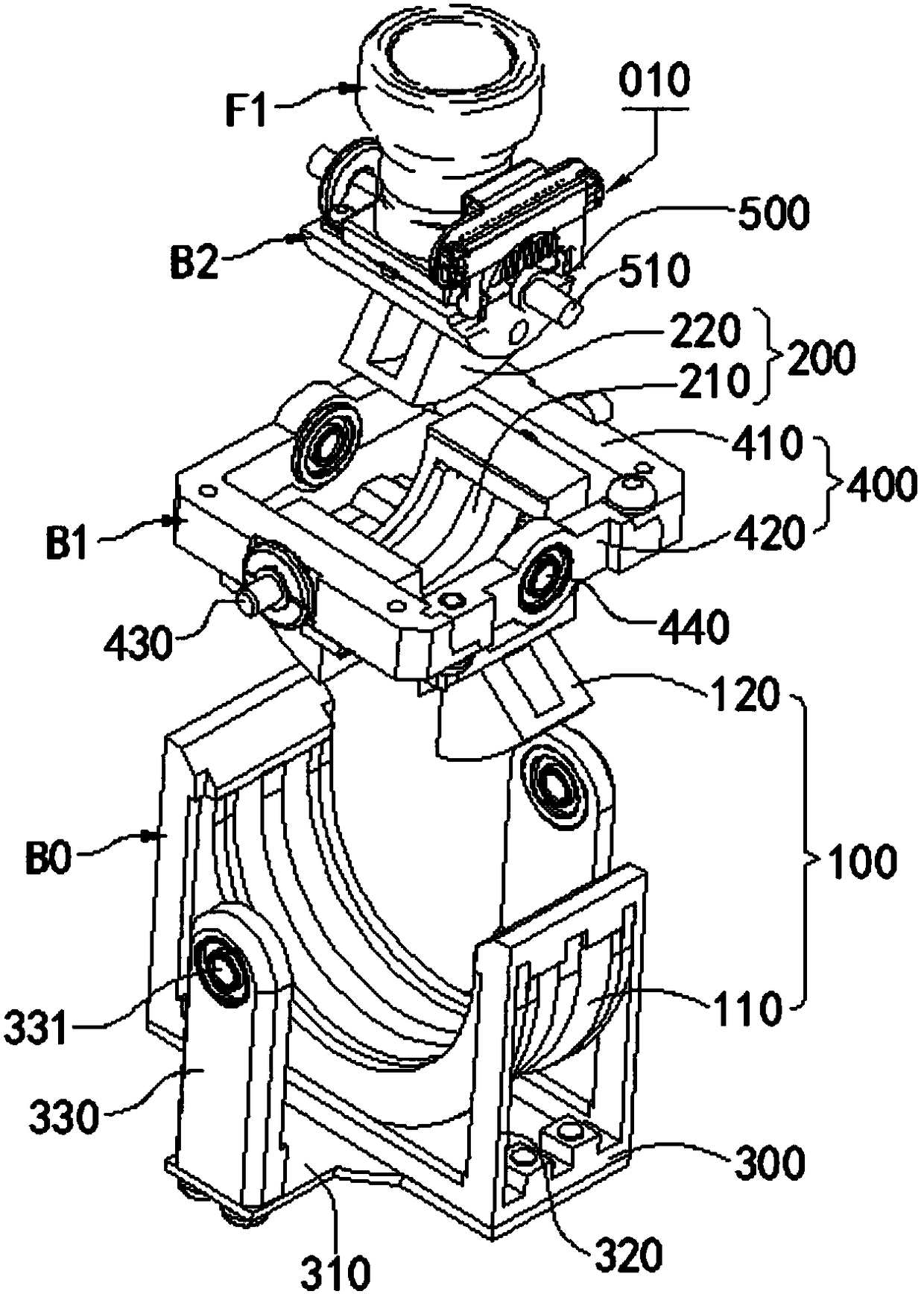
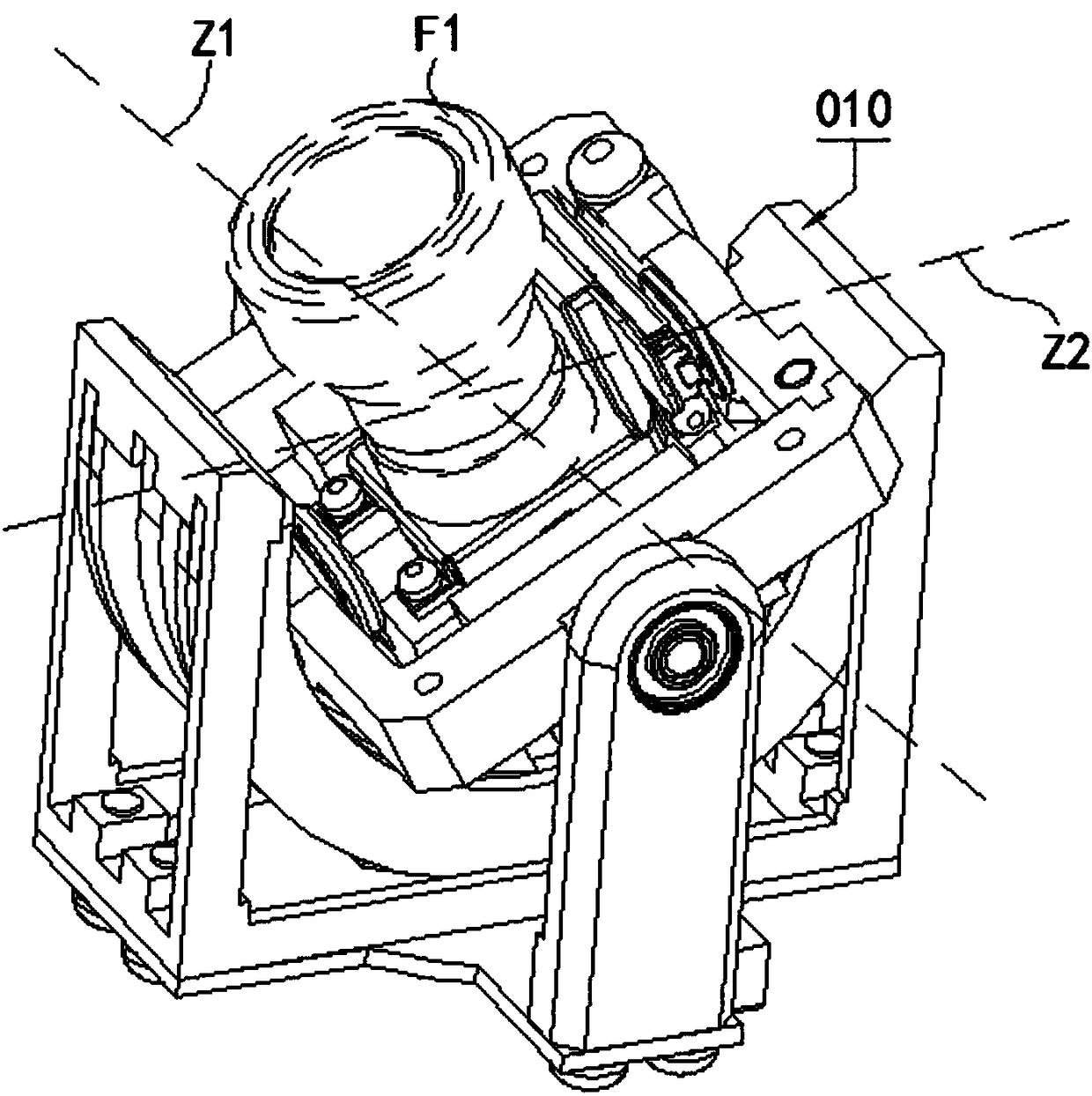
[0037] figure 1 It is a schematic structural diagram of the two-axis gimbal 010 in Embodiment 1 of the present invention. figure 2 yes figure 1 exploded view. To show its usage status, figure 1 , figure 2 The dotted line in the middle additionally shows the structure of the load device F1 connected to the two-axis gimbal 010 in this embodiment.
[0038] See figure 1 , the two-axis gimbal 010 in this embodiment includes a first motor 100 and a second motor 200, a base 300 and a rotating base 400 for supporting or connecting the first motor 100 and the second motor 200, and a load device for mounting Load connection socket 500 for F1. Wherein, both the first motor 100 and the second motor 200 are swing-angle voice coil motors.
[0039] See figure 2 (for cooperation see figure 1 ), the first motor 100 includes a first stator 110 and a first mover 120 that cooperate with each other. The second motor 200 includes a second stator 210 and a second mover 220 that cooperat...
Embodiment 2
[0056] Figure 7 It is a schematic structural diagram of the three-axis gimbal 020 in the second embodiment of the present invention. To show its usage status, Figure 7 The dotted line in the middle additionally shows the structure of the load device F1 connected to the three-axis gimbal 020 in this embodiment.
[0057] See Figure 7 , the three-axis gimbal 020 in this embodiment includes a third motor 600 and the two-axis gimbal 010 in the first embodiment. Wherein, the third motor 600 is a rotating motor composed of a fixed part 610 and a rotating part 620 that are rotatably matched. The rotating part 620 of the third motor 600 is relatively fixedly connected with the first stator 110 . Preferably, the rotation axes of the first rotating shaft Z1 , the second rotating shaft Z2 and the third motor 600 are perpendicular to each other and the three intersect at one point. The rotation axis of the third motor 600 is named as the third rotation axis Z3 below.
[0058] Opti...
Embodiment 3
[0060] Figure 8 It is a structural schematic diagram of the three-axis gimbal 030 in the third embodiment of the present invention. To show its usage status, Figure 8 The dotted line in the figure additionally shows the structure of the load device F1 connected to the three-axis gimbal 030 in this embodiment.
[0061] The three-axis gimbal 030 in this embodiment includes a third motor 600 and the two-axis gimbal 010 in the first embodiment.
[0062] Wherein, the third motor 600 is a rotating motor composed of a fixed part 610 and a rotating part 620 that are rotatably matched. The fixed part 610 of the third motor 600 is fixedly connected to the second mover 220 , and the rotating part 620 of the third motor 600 is used for connecting the load device F1 . Preferably, the rotation axes of the first rotating shaft Z1 , the second rotating shaft Z2 and the third motor 600 are perpendicular to each other and the three intersect at one point. The rotation axis of the third mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More