

An asynchronous multi-sensor fusion multi-target tracking method based on phd filtering
A multi-sensor fusion and multi-target tracking technology, which is applied to instruments, radio wave measurement systems, etc., can solve problems such as asynchronous, sensor synchronization assumptions are difficult to be guaranteed, and achieve the effect of small calculation and clear configuration structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] The specific implementation manner of the present invention will be described in detail below in combination with the technical scheme and accompanying drawings.
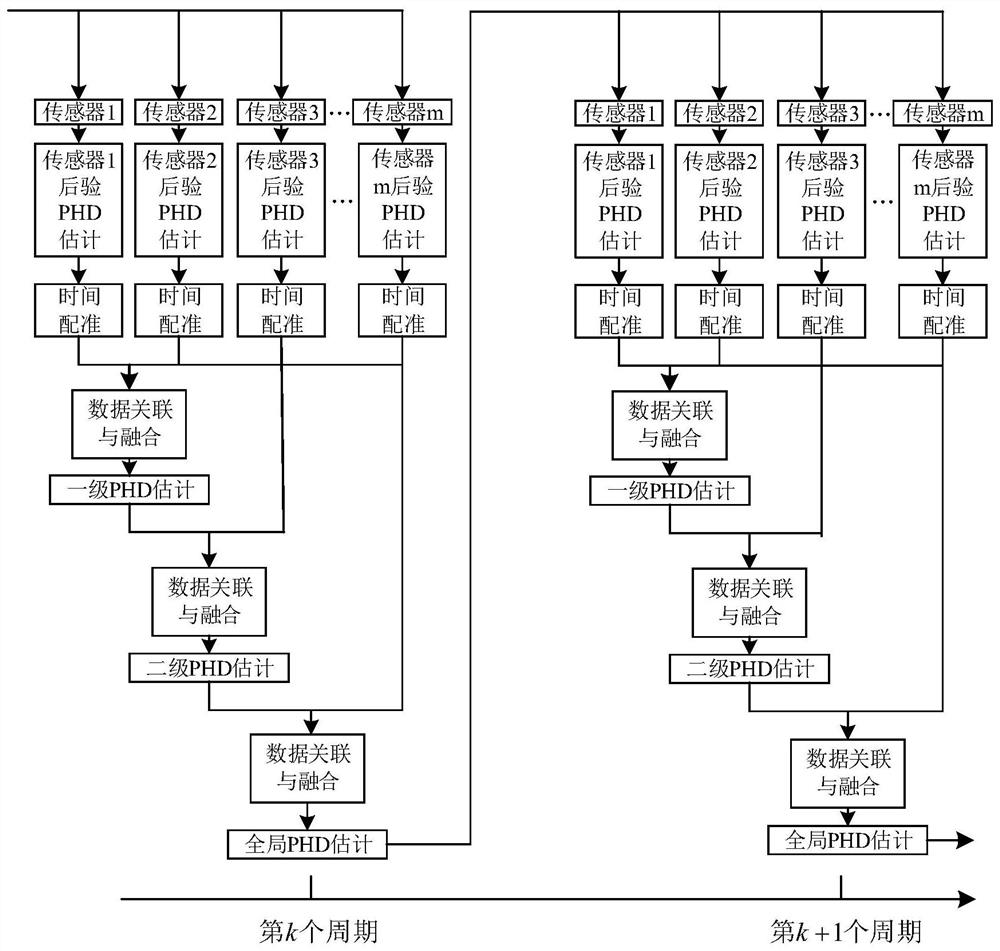
[0012] (1) Construct a multi-sensor multi-target tracking scene. The measurement of the sensor may come from the target or from the clutter. Build the motion model of the target, the measurement model of the sensor, the clutter model and the asynchronous sampling model, and initialize them .
[0013] Create a motion model for the target:
[0014] In the formula, k represents the discrete time variable, i (i=1,2,...,N) represents the serial number of the target, Indicates the state variable of the i-th target at time k, ω k Indicates that the mean is zero and the variance is Q k Gaussian white noise, mapping f k|k+1 State transition equation expressing the state transition of the i-th target from time k to time k+1. The state change of the i-th target at time k Among them, (x i,k ,y i,k ) is the po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More