

Multi-sensor GM-PHD adaptive sequential fusion multi-target tracking method
A multi-target tracking and multi-sensor technology, which is applied in the field of multi-sensor GM-PHD adaptive sequential fusion multi-target tracking, achieves the effects of small calculation amount, wide application and clear configuration structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The specific implementation manner of the present invention will be described in detail below in combination with the technical scheme and accompanying drawings.
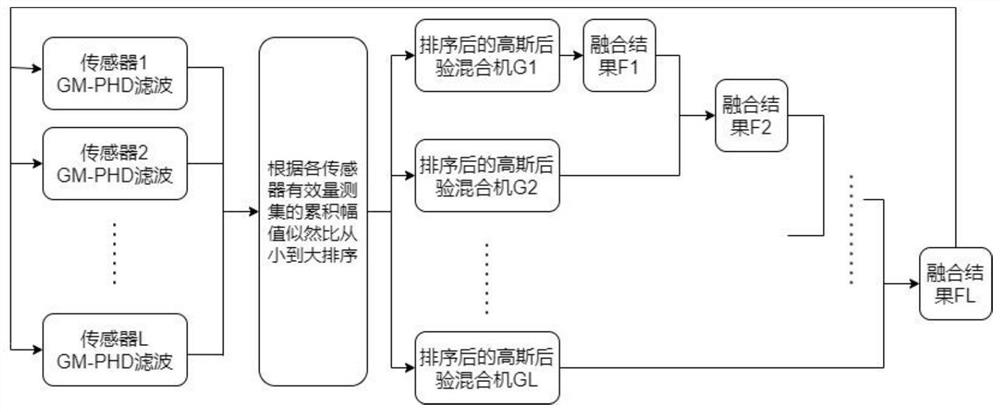
[0020] Such as figure 1 As shown, the multi-sensor GM-PHD adaptive sequential fusion method based on cumulative magnitude likelihood is characterized in that the method specifically includes the following steps:
[0021] Step (1), build a multi-sensor multi-target tracking scene, and initialize the motion model of the target, set the relevant parameters of the target motion, including the process noise of the target motion and the measurement noise of the sensor; wherein the measurement of the sensor comes from the target or from clutter;
[0022] The motion model under the linear discrete system is expressed as:
[0023] x k = F x k-1 +B·μ k +ω k (1)
[0024] where x k is the state vector of the target at time k, F is the target state transition matrix, B is the control matrix, μ k is the motion co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More