

A path-following control method for unmanned vehicles based on soft-constrained quadratic programming MPC
An unmanned vehicle, secondary programming technology, applied in vehicle position/route/height control, two-dimensional position/course control, control/regulation system, etc. Change and other problems, to achieve the effect of accurate path tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments. It should be pointed out that the technical solution and design principles of the present invention will be described in detail below only with an optimized technical solution, but the protection scope of the present invention does not limited to this.
[0094] The described embodiment is a preferred implementation of the present invention, but the present invention is not limited to the above-mentioned implementation, without departing from the essence of the present invention, any obvious improvement, replacement or modification that those skilled in the art can make Modifications all belong to the protection scope of the present invention.
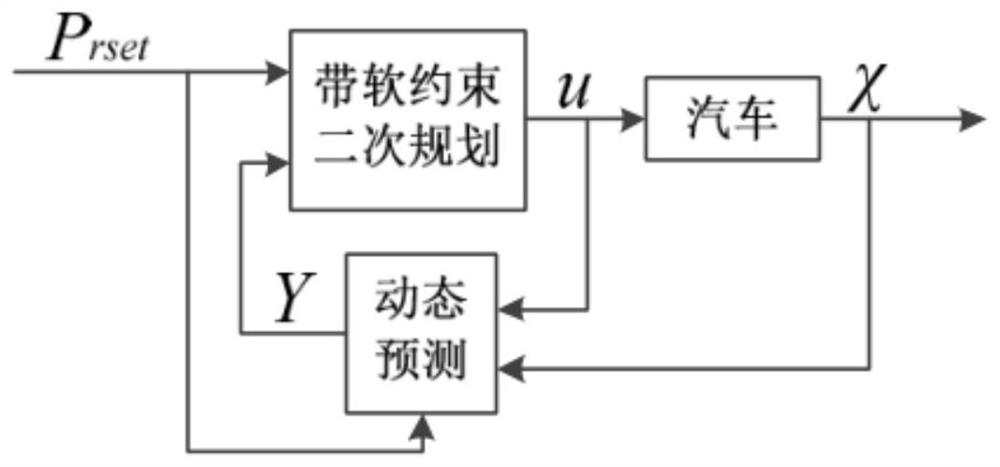
[0095] A path-following control method for unmanned vehicles based on soft-constrained quadratic programming MPC, such as figure 1 shown, including the following steps:
[0096] 1) System initialization,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More