

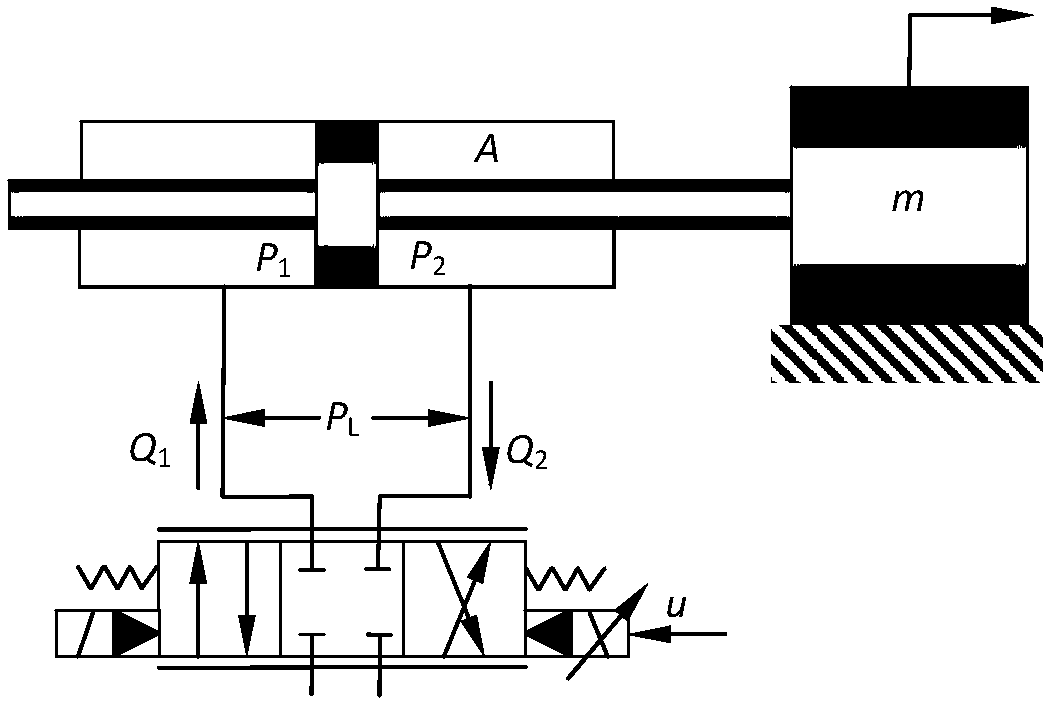
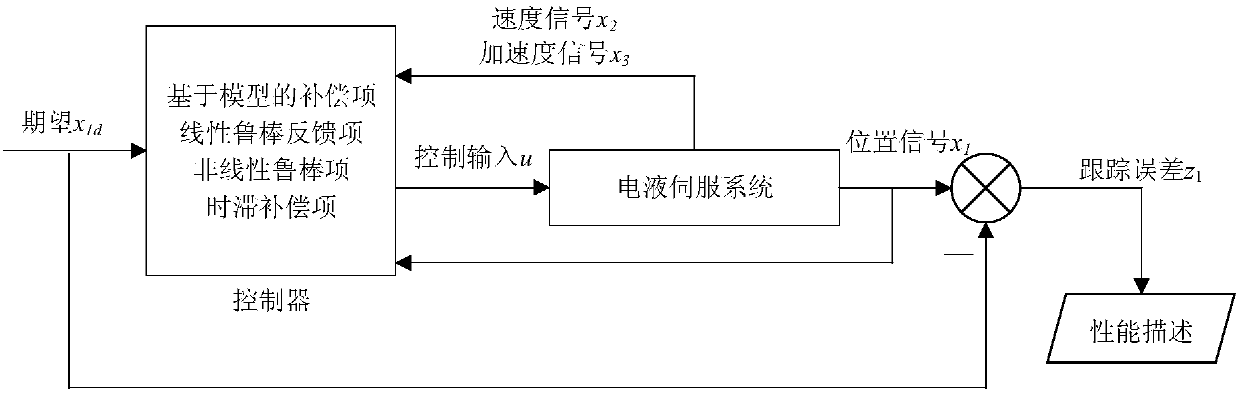
Electro-hydraulic servo system position tracking control method considering input delay constraints
An electro-hydraulic servo system and tracking control technology, applied in the direction of program control, computer control, general control system, etc., can solve the problem of few non-linear system control strategies, etc., and achieve the effect of high-precision position tracking performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0099] In order to assess the performance of the designed controller, the parameters in Table 1 are taken in the simulation to model the electro-hydraulic servo system:
[0100] Simulation parameters of electro-hydraulic servo system
[0101]
[0102] Build the system simulation model in MATLAB / Simulink. The simulation step size is set to 0.0005s. The sampling time is 30 seconds. By building a system model for Simulink and applying MATLAB to add the control law to the controller, the parameters in the controller are selected as follows: k 1 =4000,k 2 =1000,k 3 =20,k r =2.
[0103] According to different system working conditions, the simulation process is divided into three parts:
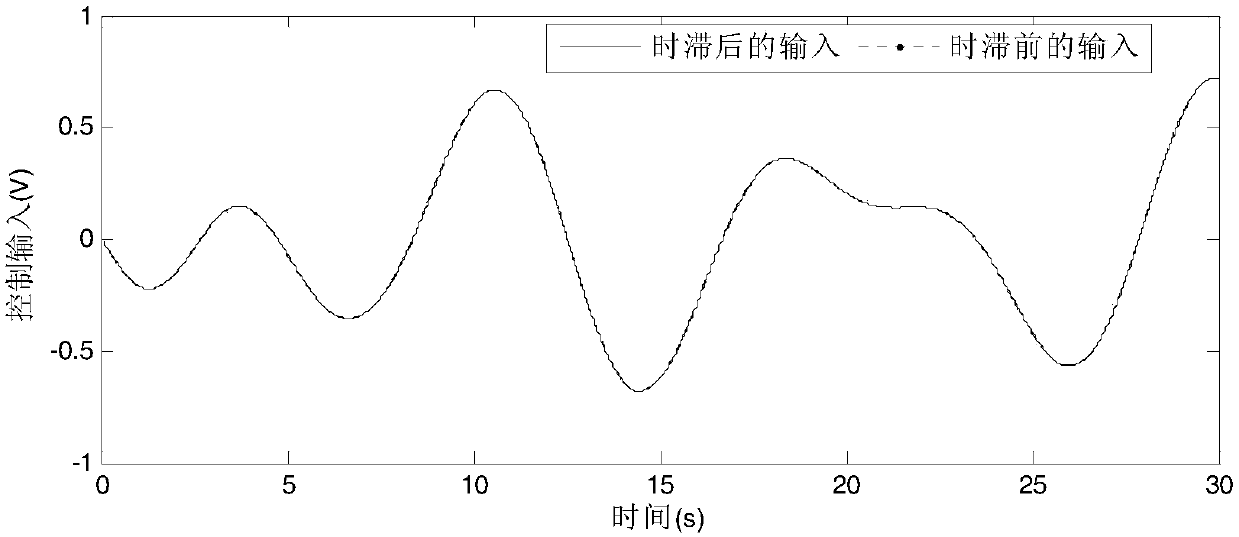
[0104] ①Low speed and small time lag
[0105] Specify the desired position output command of the electro-hydraulic servo system as: x d (t)=0.03sin(0.2πt)[1-exp(-0.01t 3 )]m, at this time it is a low-speed working condition, the specified time lag is 5ms, and the comparison before and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More