

Light mechanical collision type space debris capturing web claw
A technology of space debris and mechanical collision, which is applied to spaceflight equipment, tools, transportation and packaging, etc. It can solve the problems of uncertain geometric shape, uncertain motion state, and difficulty in determining the capture point of space debris, so as to improve the grasp of space debris. The effect of successful capture rate, low launch cost, simple and reliable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention is described in further detail below in conjunction with accompanying drawing:
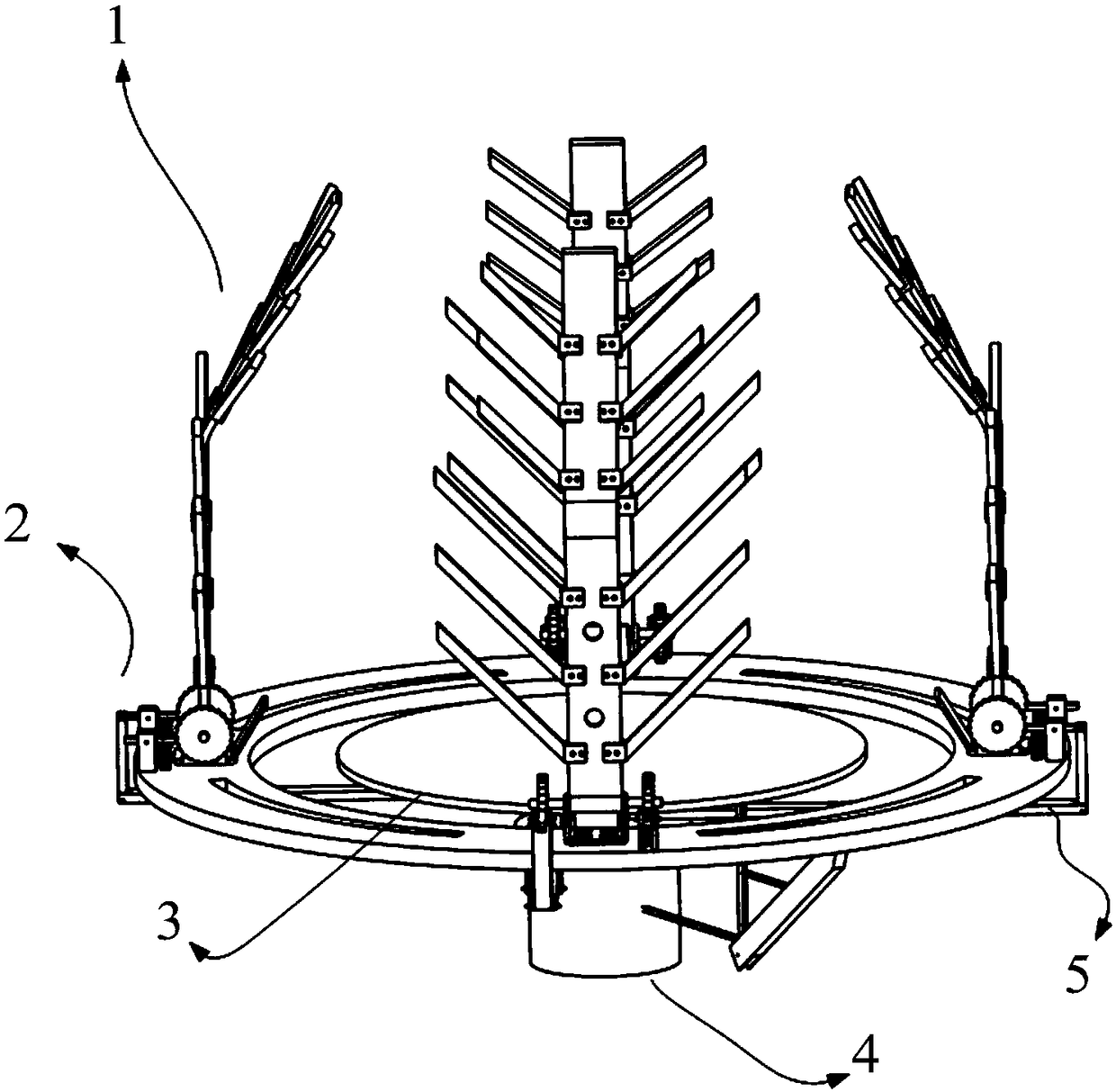
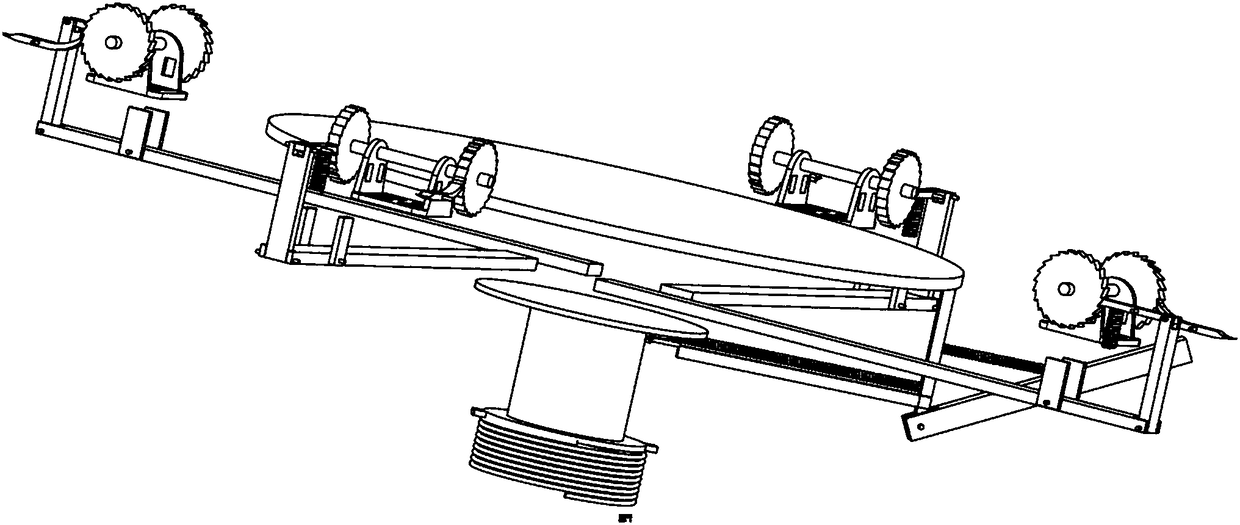
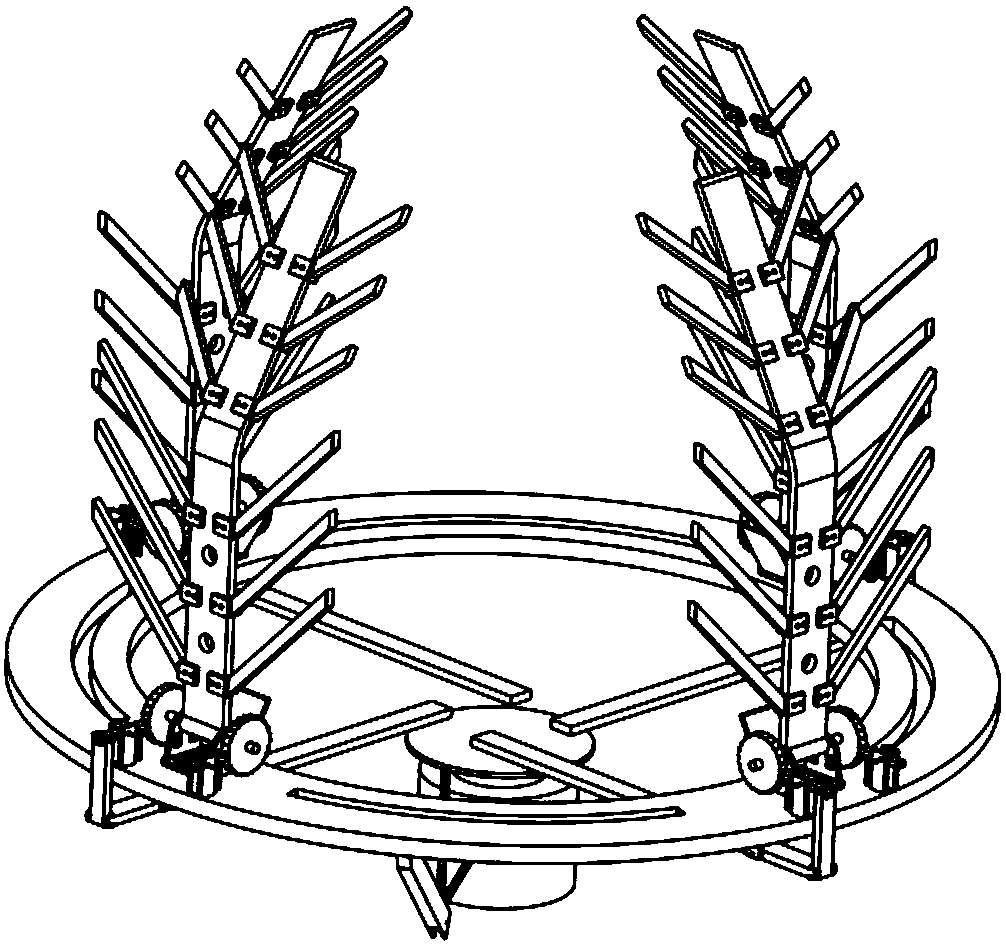
[0019] see Figure 1-3 , the light mechanical collision type space debris capture net claw of the present invention includes a bottom plate, a plurality of claw teeth 1 and claw switch modules installed on the bottom plate. Net pawl pawl tooth 1 is made of the pawl tooth that has spoke respectively on both sides of four. When the net claw claw teeth 1 were closed, the four net claw claw teeth 1 and the spokes on both sides could form a semi-closed capture envelope to prevent the capture target from escaping.
[0020] A rotating ratchet is installed at the root of the claw, and there is a torsion spring inside the ratchet, and the movement of the entire claw is completed by the torsion spring; the ratchet switch / limit is the ratchet limit plate at the root of the claw, and its function is mainly to limit the claw closed angle.
[0021] The pawl switch module includes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More