

A Multi-UAV Cooperative Target Tracking Method Combining Improved APF and Segmented Bezier
A multi-UAV, target tracking technology, applied in the control of finding targets, instruments, 3D position/channel control, etc., can solve the problem of algorithm falling into local optimum, path oscillation, small calculation amount, etc., to avoid sharp turns phenomenon, solve the anti-collision problem, and ensure the effect of smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solution of the present invention is described in detail in combination with the accompanying drawings.
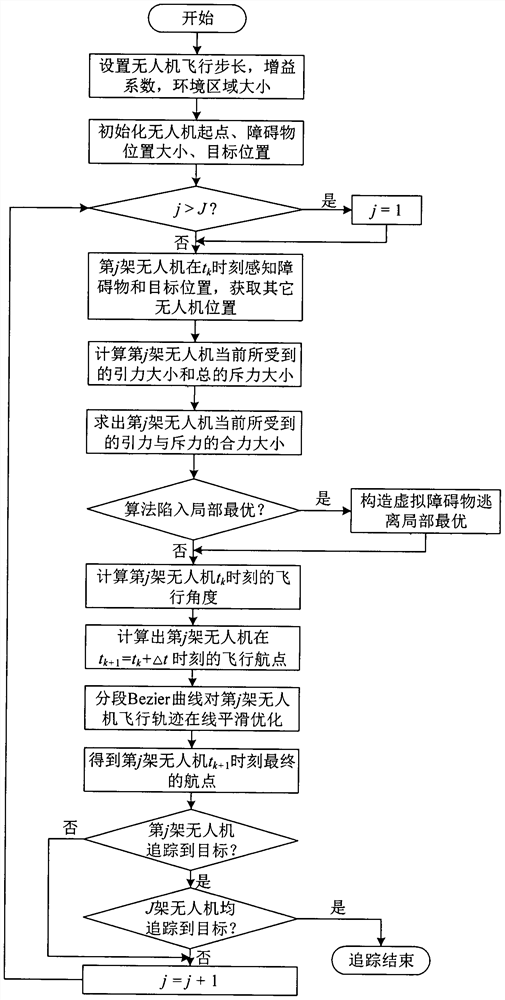
[0030] A kind of improved APF of the present invention and subsection Bezier combine multi-unmanned aerial vehicle cooperative target tracking method, specifically comprise the following steps:
[0031] Step 1 Set the size of the environment area, the starting position of the UAV, and the flight step of the UAV. Set the gain coefficients, including target gravitational gain k, obstacle repulsion gain m, and UAV repulsion gain ξ.
[0032] Step 2 uses the airborne camera and lidar to detect the obstacle position, obstacle size and target position.
[0033] Step 3 judges whether j>J (J is the total number of drones), if yes then j=1, go to step 4; otherwise go to step 4.
[0034] Step 4 The jth UAV is at t k Perceive the position of obstacles and targets at all times, and obtain the position of other drones. Calculate the jth UAV at t k target gravit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More