

Method and device for lateral control of unmanned vehicle
A technology of lateral control and unmanned vehicles, which is applied in vehicle position/route/height control, control/adjustment system, non-electric variable control, etc., and can solve problems such as frequent output of corner control commands, unstable driving, and steering wheel shake
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
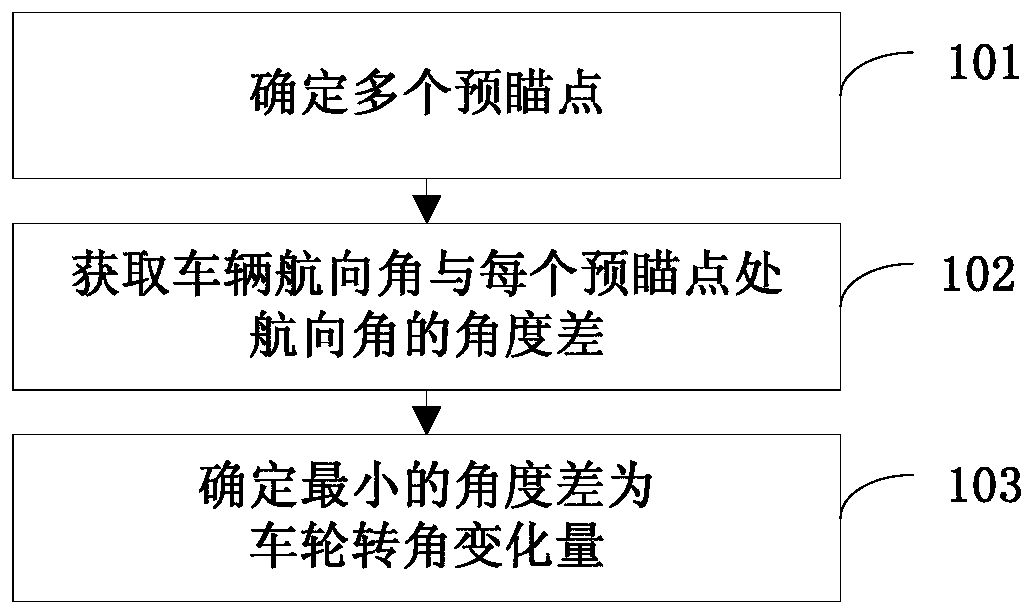
[0038] The flowchart of an embodiment of the unmanned vehicle lateral control method of the present invention is as follows: figure 1 shown.
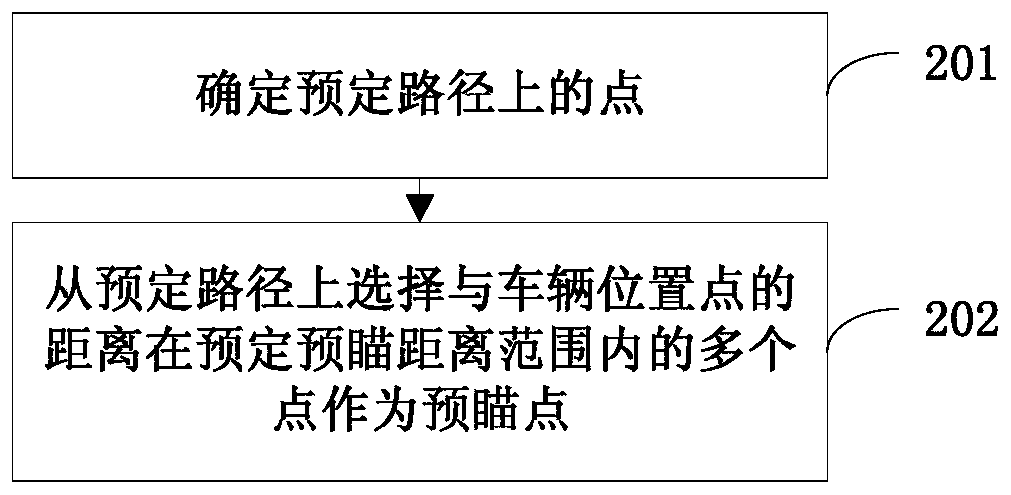
[0039] In step 101, a plurality of preview points are determined. In an embodiment, multiple points may be selected within the detection range according to a predetermined path as preview points.
[0040] In step 102, the angle difference between the heading angle of the vehicle and the heading angle at each preview point is acquired. In one embodiment, the vehicle heading angle may be the vehicle's current heading angle. The heading angle at the preview point may be the heading angle when the vehicle drives to the preview point. In one embodiment, the path of the vehicle to each preview point can be calculated to obtain the heading angle at each preview point, and then the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More