

Topology segmentation method and device oriented to closed space
A closed space and topological technology, applied in image analysis, image enhancement, instruments, etc., can solve problems such as inability to determine topological space, inability to perform effective segmentation, and high mis-segmentation rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
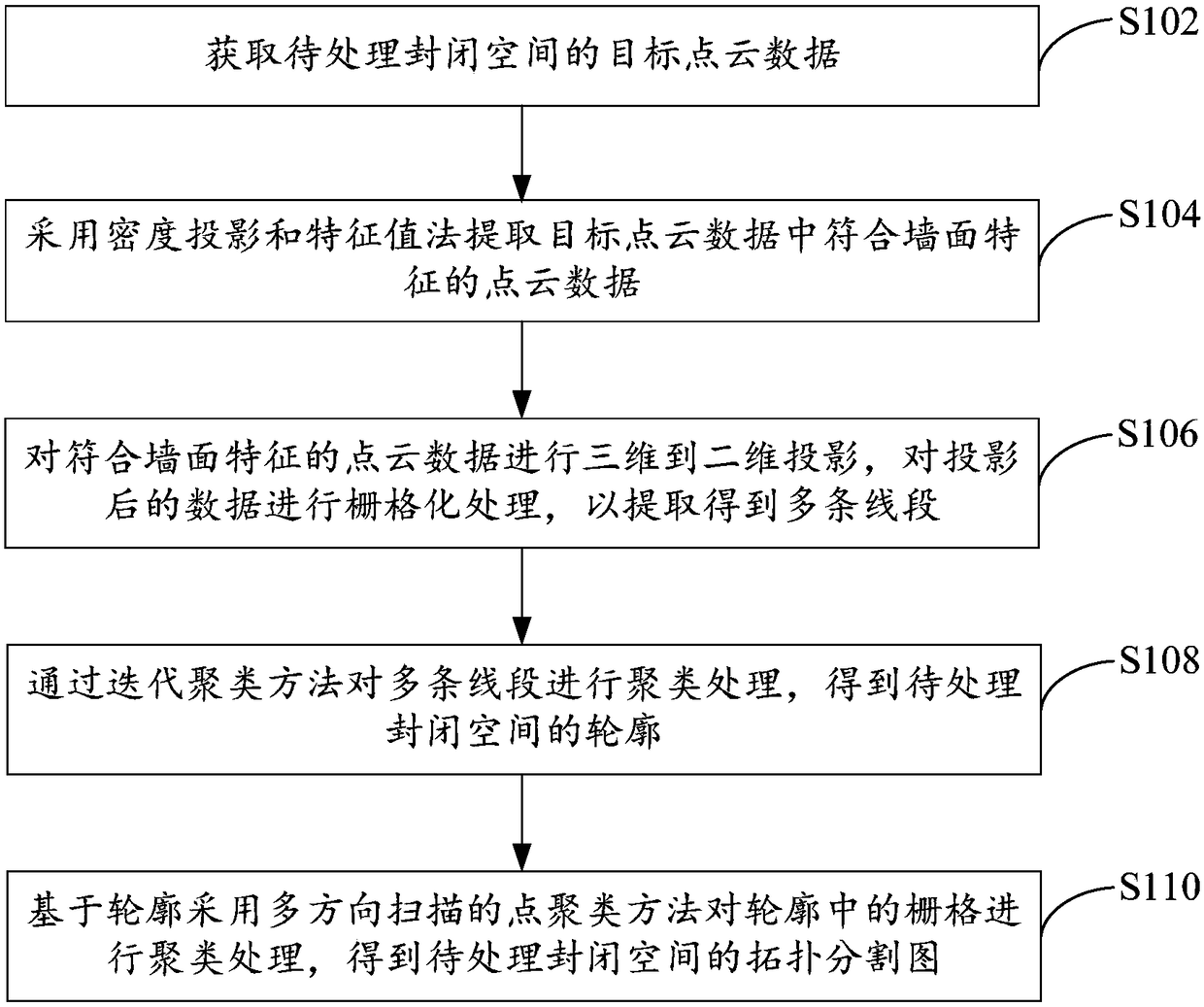
[0035] A topological segmentation method for closed spaces, refer to figure 1 , the method includes:
[0036] S102. Obtain target point cloud data of the closed space to be processed, wherein the target point cloud data is preprocessed point cloud data;
[0037] In the embodiment of the present invention, the closed space to be treated includes a family indoor space, and may also include other spaces, which are not specifically limited in the embodiment of the present invention.
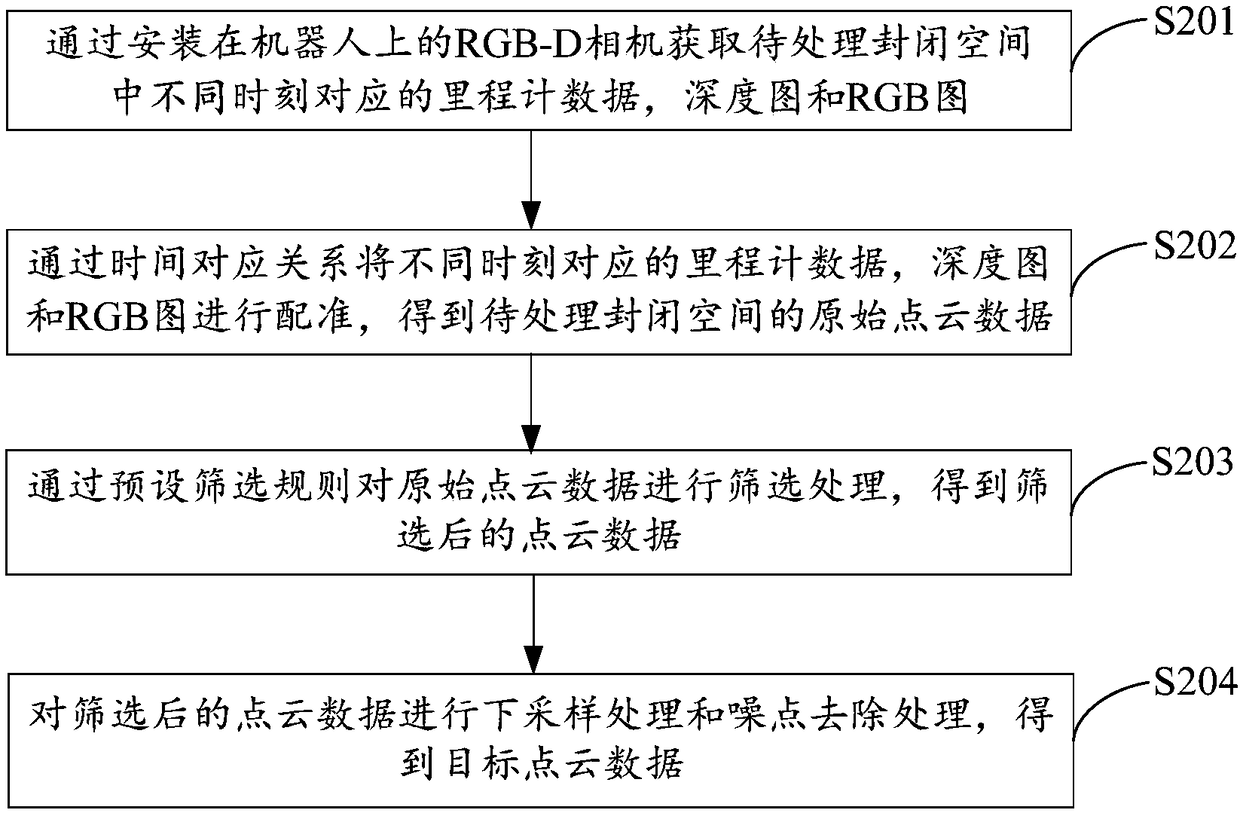
[0038] The acquisition of the target point cloud data of the closed space to be processed will be introduced in detail below, and will not be repeated here.
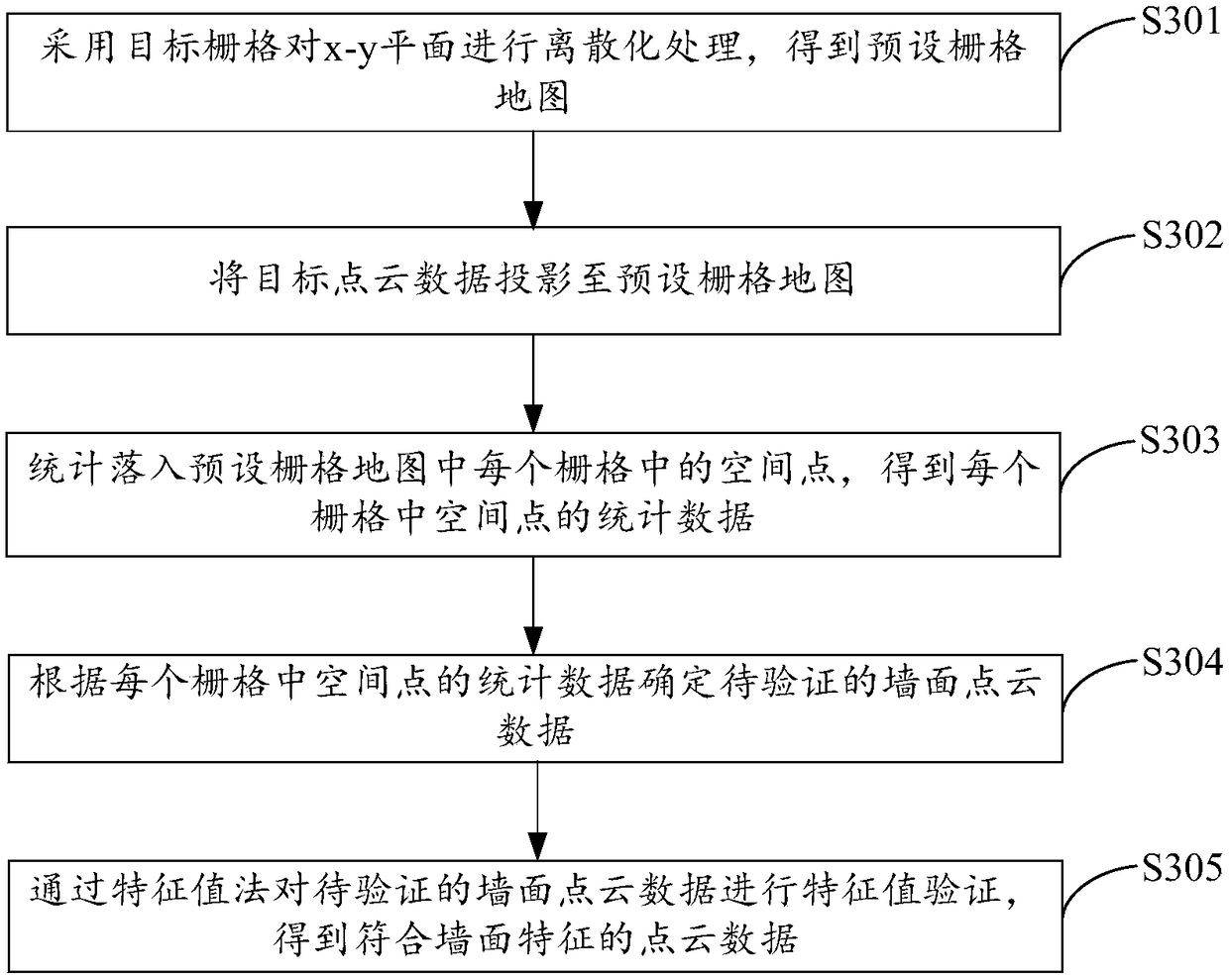
[0039] S104, using density projection and eigenvalue method to extract the point cloud data conforming to the characteristics of the wall in the target point cloud data;
[0040] After obtaining the target point cloud data, the density projection and eigenvalue method are used to extract the point cloud data in the target point cloud data tha...
Embodiment 2
[0155] A topological segmentation device for closed spaces, refer to Figure 8 , the device consists of:
[0156] The acquisition module 11 is configured to acquire target point cloud data of the closed space to be processed, wherein the target point cloud data is preprocessed point cloud data;
[0157] Extraction module 12, for adopting density projection and eigenvalue method to extract the point cloud data that conforms to wall surface feature in target point cloud data;
[0158] The rasterization processing module 13 is used to carry out three-dimensional to two-dimensional projection to the point cloud data conforming to the wall surface characteristics, and rasterizes the projected data to extract a plurality of line segments;
[0159] The first clustering processing module 14 is configured to perform clustering processing on a plurality of line segments by an iterative clustering method to obtain an outline of a closed space to be processed, wherein the outline include...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More