

Three-dimensional laser radar point cloud target segmentation method based on depth map
A three-dimensional laser and target segmentation technology, applied in image analysis, image enhancement, image data processing and other directions, can solve the problems of sparse point cloud data, under-segmentation and noise in point cloud segmentation processing, to achieve point cloud segmentation, improve real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to make the purpose, technical solutions and advantages of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Obviously, the described embodiments are only part of the embodiments of the present invention, and Not all examples. The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
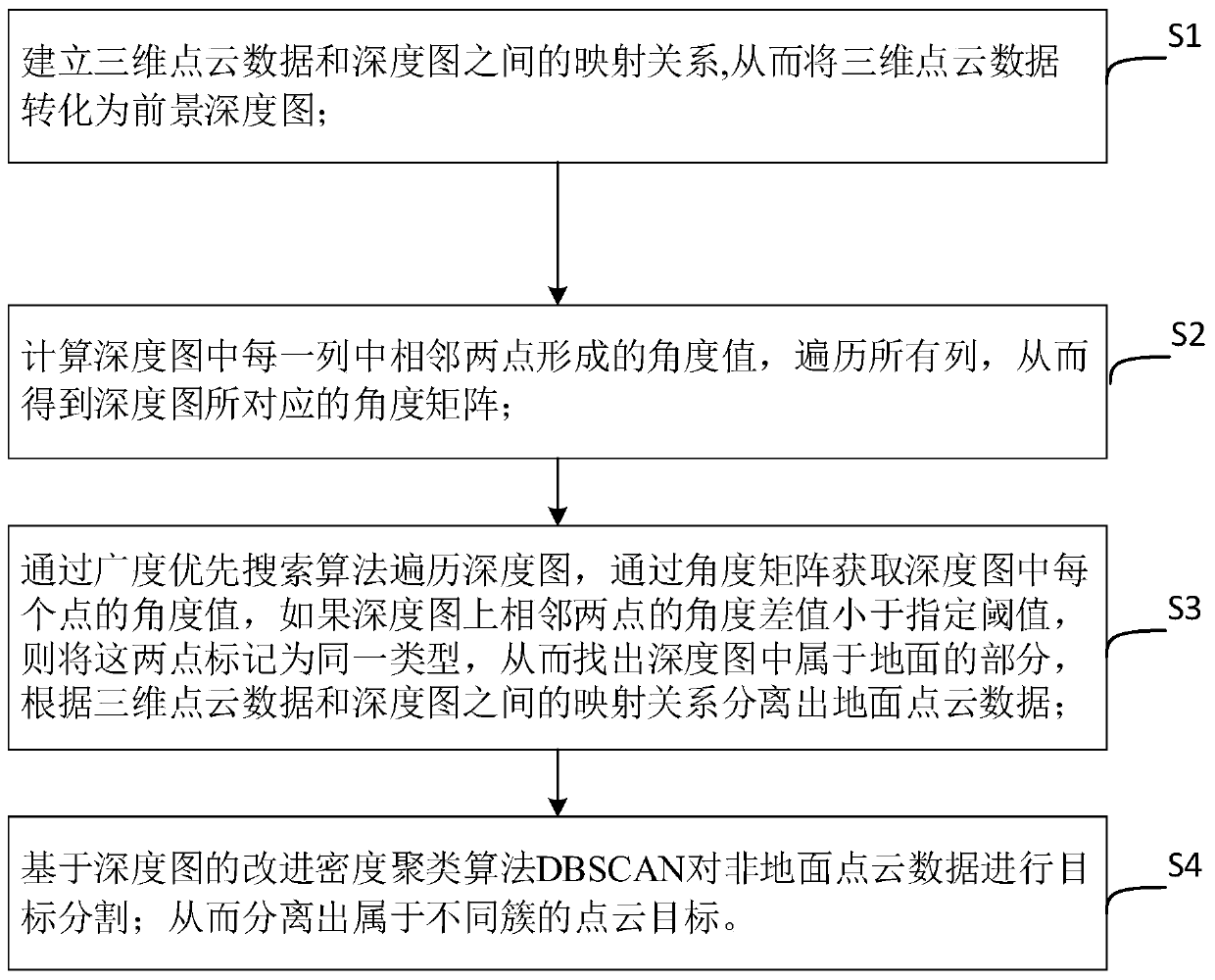
[0058] Such as figure 1 As shown, a kind of three-dimensional lidar point cloud object segmentation method based on depth map that the present invention adopts comprises the following steps:
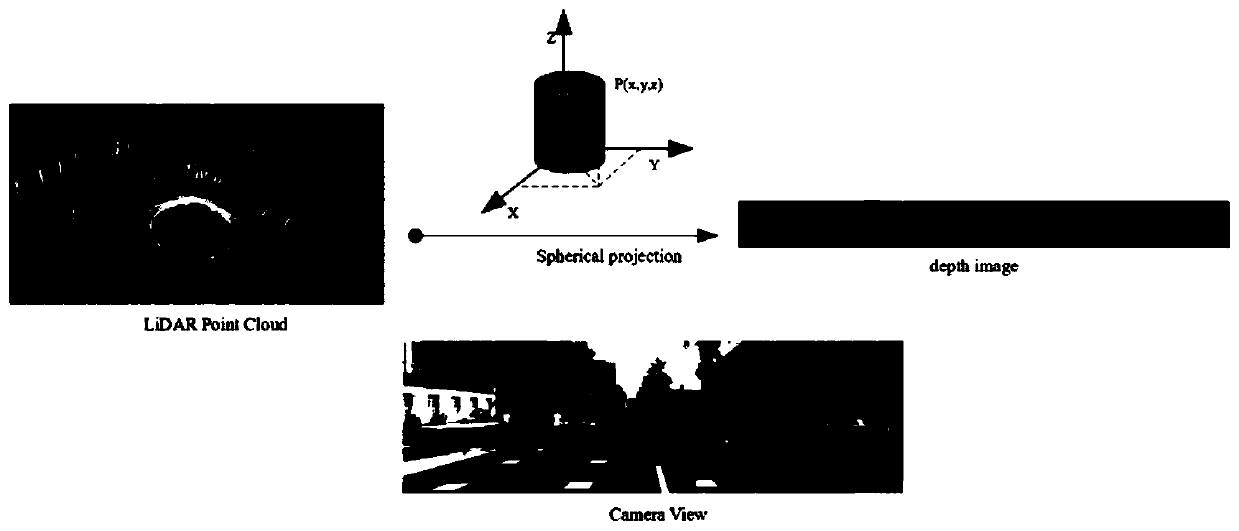
[0059] S1: Establish the mapping relationship between the 3D point cloud data and the depth map, so as to c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More