

Vehicle yaw stability predicting model control method
A technology of stability prediction and model control, applied in the field of vehicle control, can solve problems such as the large computational burden of the controller, the inability to meet the solution time requirements, and the inability to meet the system control accuracy requirements, and achieve the effect of ensuring vehicle stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
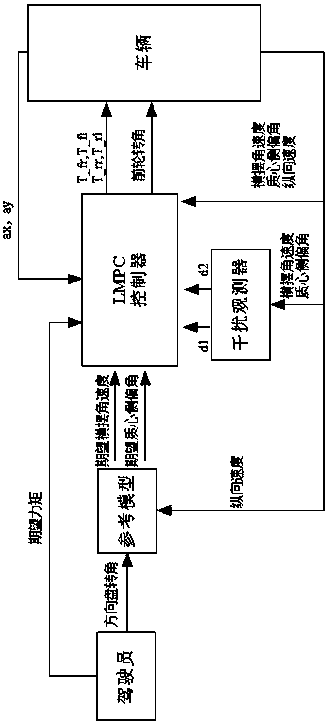
[0067] The invention aims at the vehicle yaw stability control problem of the in-wheel motor, and uses a predictive control algorithm based on a disturbance observer to design a controller, so that the vehicle can track the expected value as much as possible and ensure the stability of the vehicle. Because the yaw stability control of electric vehicles belongs to a nonlinear fast dynamic system, the nonlinear model predictive control cannot meet the control time requirements, and the linear model predictive control can not meet the control accuracy requirements although it solves the time period, so it is difficult to design an effective controller. However, the present invention designs a predictive control algorithm based on a disturbance observer for this system, which can effectively deal with the linear model accuracy problem and the controller solution time problem, while considering the drive torque constraint.
[0068] Research method of the present invention is based ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More