Pose measurement device and compliance control method for spacecraft docking and capture process
A capture process, pose measurement technology, applied in space vehicle docking devices, photo interpretation, etc., can solve the problems of docking mission failure, large contact force fluctuations, inability to accurately compensate friction, damping parameters, etc., to reduce capture The effect of failure probability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
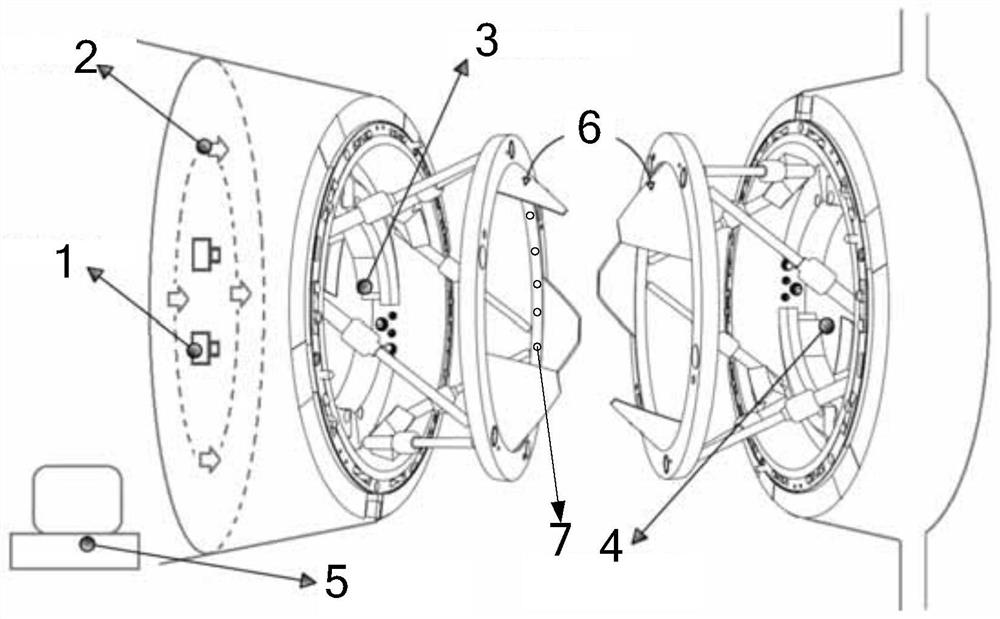
[0034] Specific implementation mode one: combine figure 1 Describe this embodiment, this embodiment includes active docking mechanism 3, passive docking mechanism 4, binocular camera 1, data processing and motion control computer 5 and active lighting system,
[0035] The active docking mechanism 3 is a heterogeneous isomorphic peripheral docking mechanism with the guide plate 6 turned inside out, which is used for data connection such as compliant capture, rigid connection, etc. of the tracking spacecraft and the target spacecraft during the docking process; for example: developed by the Soviet Union / Russia The APAS-89 docking mechanism is a weak impact docking mechanism designed by NASA. These mechanisms all have the structural characteristics of the heterogeneous isomorphic peripheral docking mechanism with the guide plate turned inside out, that is, the docking mechanism adopts the Stewart structure and uses the guide plate for guidance. The passive docking mechanism 4 is...
specific Embodiment approach 2
[0041] Specific implementation mode two: combination figure 1 Describe this embodiment. In this embodiment, the two cameras of the binocular camera 1 are symmetrically installed on both sides of the center projection point of the docking ring at the initial position of the active docking mechanism 3. At the same time, the pixels of the cameras meet the measurement accuracy requirements. In addition, during the docking process, the active docking Mechanism 3 and passive docking mechanism 4 are always within the observation field of view of the two cameras, clear and unobstructed. It should be noted that if in a spacecraft such as a manned spacecraft or a cargo spacecraft, the installation position of the binocular camera 1 must not affect the passage of astronauts and cargo, and can be unloaded together with the hatch or transferred to a specific position, for example, in In a manned spacecraft, the binocular camera 1 can generally be installed at the hatch at the bottom of the...
specific Embodiment approach 3
[0042] Specific implementation mode three: combination figure 1 , figure 2 and image 3 Describe this implementation mode, this implementation mode includes the following steps;
[0043] Step 1: Use the binocular camera 1 to collect and capture images of the guide plate 6 of the active docking mechanism 3 and the guide plate 6 of the passive docking mechanism 4 during the capture process;
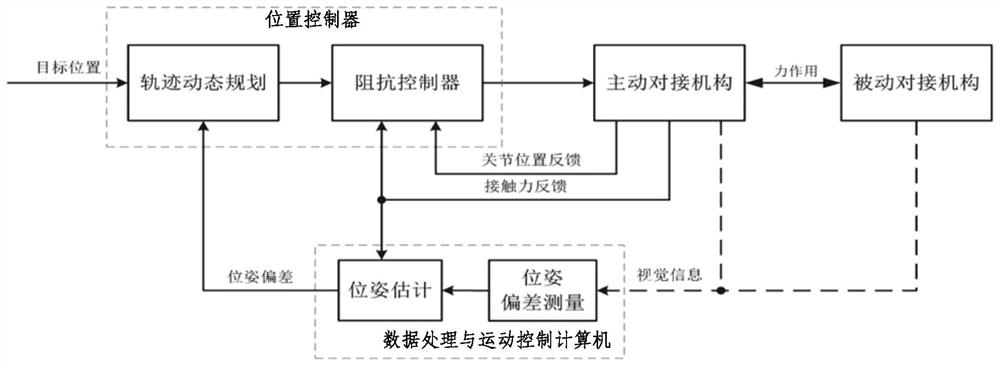
[0044] Step 2: Data processing and motion control The computer 5 processes the image of the guide plate 6 collected by the binocular camera 1: first preprocesses the image of the guide plate 6 collected, and recognizes the preprocessed image according to the characteristics of the guide plate 6 Out of the guide plate 6; then use the principle of binocular stereo vision to calculate the pose of the identified guide plate 6 based on the camera coordinate system; then obtain the pose deviation between the active docking mechanism 3 and the passive docking mechanism 4 through vector calculat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More