Method and device for controlling robot, robot and storage medium
A control method, robot technology, applied in the field of robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
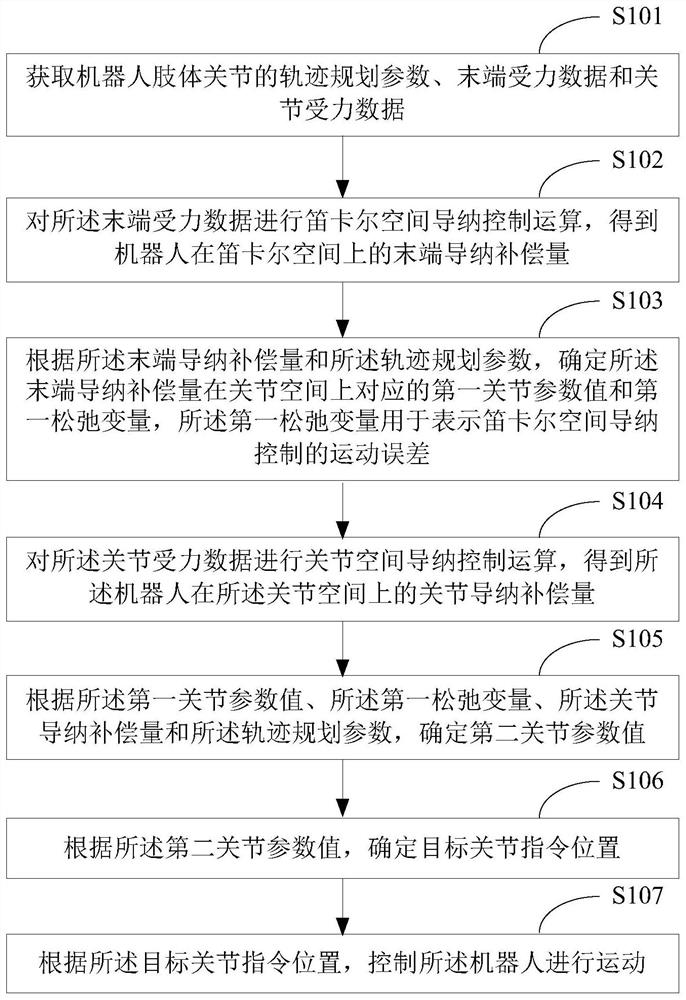
[0038] figure 1 It shows a schematic flowchart of the first robot control method provided by the embodiment of the present application. The execution subject of the robot control method is a robot, and the details are as follows:
[0039] In S101, trajectory planning parameters, end force data and joint force data of the robot limb joints are acquired.
[0040] In the embodiment of the present application, the trajectory planning parameters are parameters for planning the motion trajectory of the joints of the limbs of the robot, which can be used to describe the expected reference position during the movement of the robot. The trajectory planning parameters may be input by the user, or may be generated by the robot's own path planning algorithm.
[0041] The force data at the end is the data representing the magnitude of the force on the end of the limb of the robot, and the force data at the end can be collected by a force sensor installed at the end of the limb of the robo...
Embodiment 2
[0127] Figure 4 It shows a schematic structural diagram of a robot control device provided by the embodiment of the present application. For the convenience of description, only the parts related to the embodiment of the present application are shown:
[0128] The robot control device includes: an acquisition unit 41, a first admittance control operation unit 42, a first joint parameter value determination unit 43, a second admittance control operation unit 44, a second joint parameter value determination unit 45, a target joint command position Determination unit 46 and motion control unit 47 . in:
[0129] An acquisition unit 41, configured to acquire trajectory planning parameters, terminal force data and joint force data of robot limb joints;
[0130] The first admittance control calculation unit 42 is used to perform Cartesian space admittance control calculation on the end force data to obtain the end admittance compensation amount of the robot in Cartesian space;
...
Embodiment 3
[0144] Figure 5 It is a schematic diagram of a robot provided by an embodiment of this application. Such as Figure 5 As shown, the robot 5 of this embodiment includes: a processor 50, a memory 51, and a computer program 52 stored in the memory 51 and operable on the processor 50, such as a robot control program. When the processor 50 executes the computer program 52, the steps in the above-mentioned embodiments of the robot control method are realized, for example figure 1 Steps S101 to S107 are shown. Alternatively, when the processor 50 executes the computer program 52, it realizes the functions of the modules / units in the above-mentioned device embodiments, for example Figure 4 The functions of the acquisition unit 41 to the motion control unit 47 are obtained.
[0145] Exemplarily, the computer program 52 can be divided into one or more modules / units, and the one or more modules / units are stored in the memory 51 and executed by the processor 50 to complete this app...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More