

Unmanned equipment path planning method giving consideration to energy supply
A device path and energy technology, applied in the direction of energy storage device, position/direction control, vehicle position/route/height control, etc., can solve the problem of slow algorithm convergence, less consideration of unmanned equipment energy supply, and restrict unmanned Equipment and other issues to achieve the effect of optimizing path cost, avoiding excessive complexity of mathematical models, and simplifying energy supply considerations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to facilitate those skilled in the art to understand the technical content of the present invention, the content of the present invention will be further explained below in conjunction with the accompanying drawings.
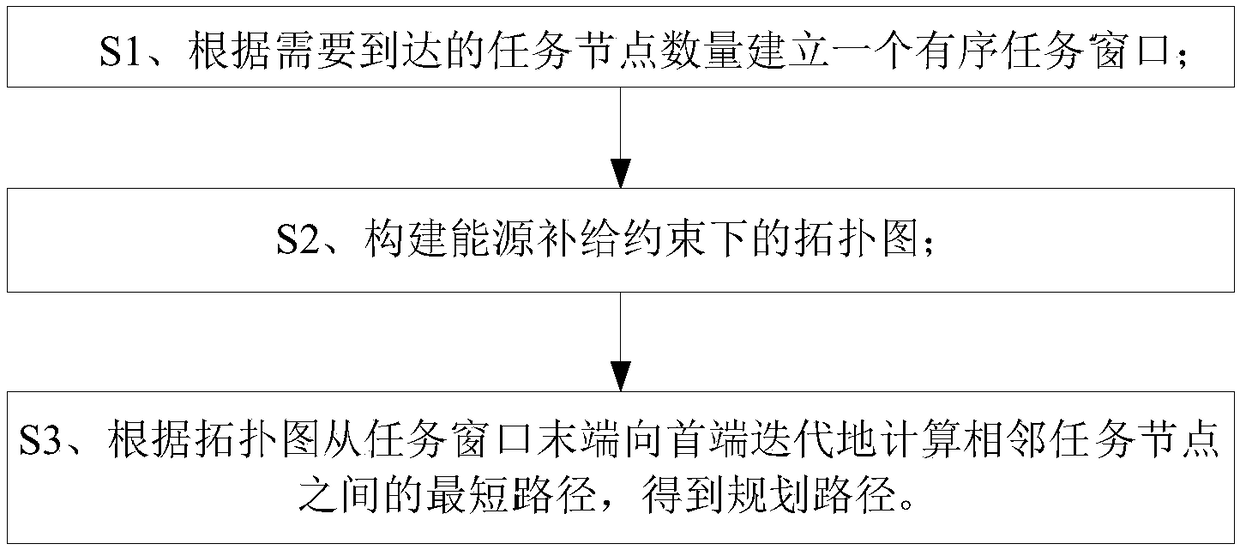
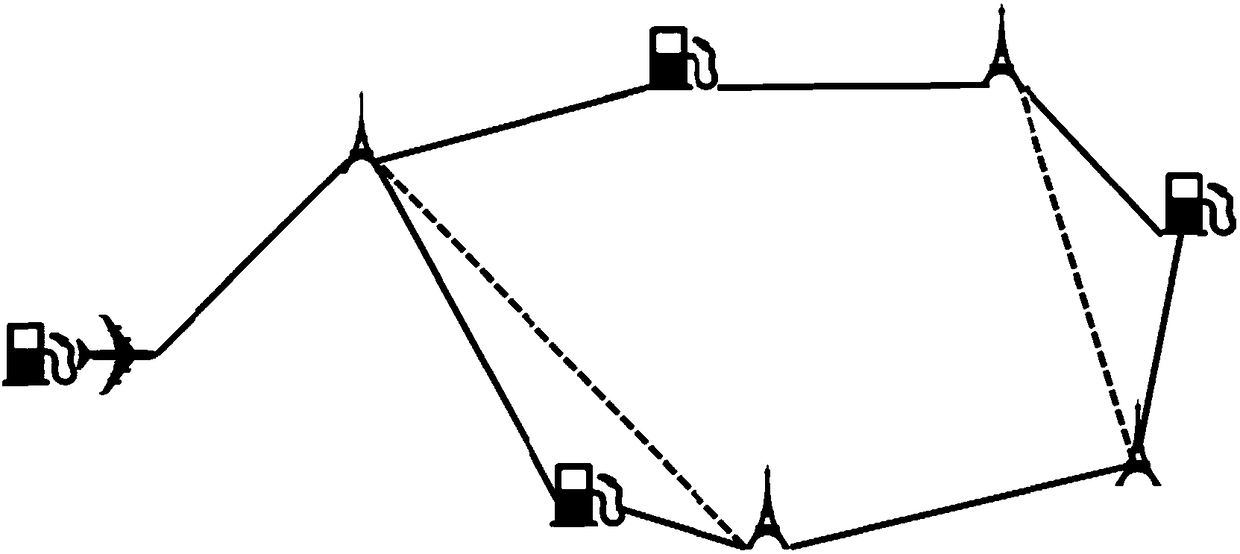
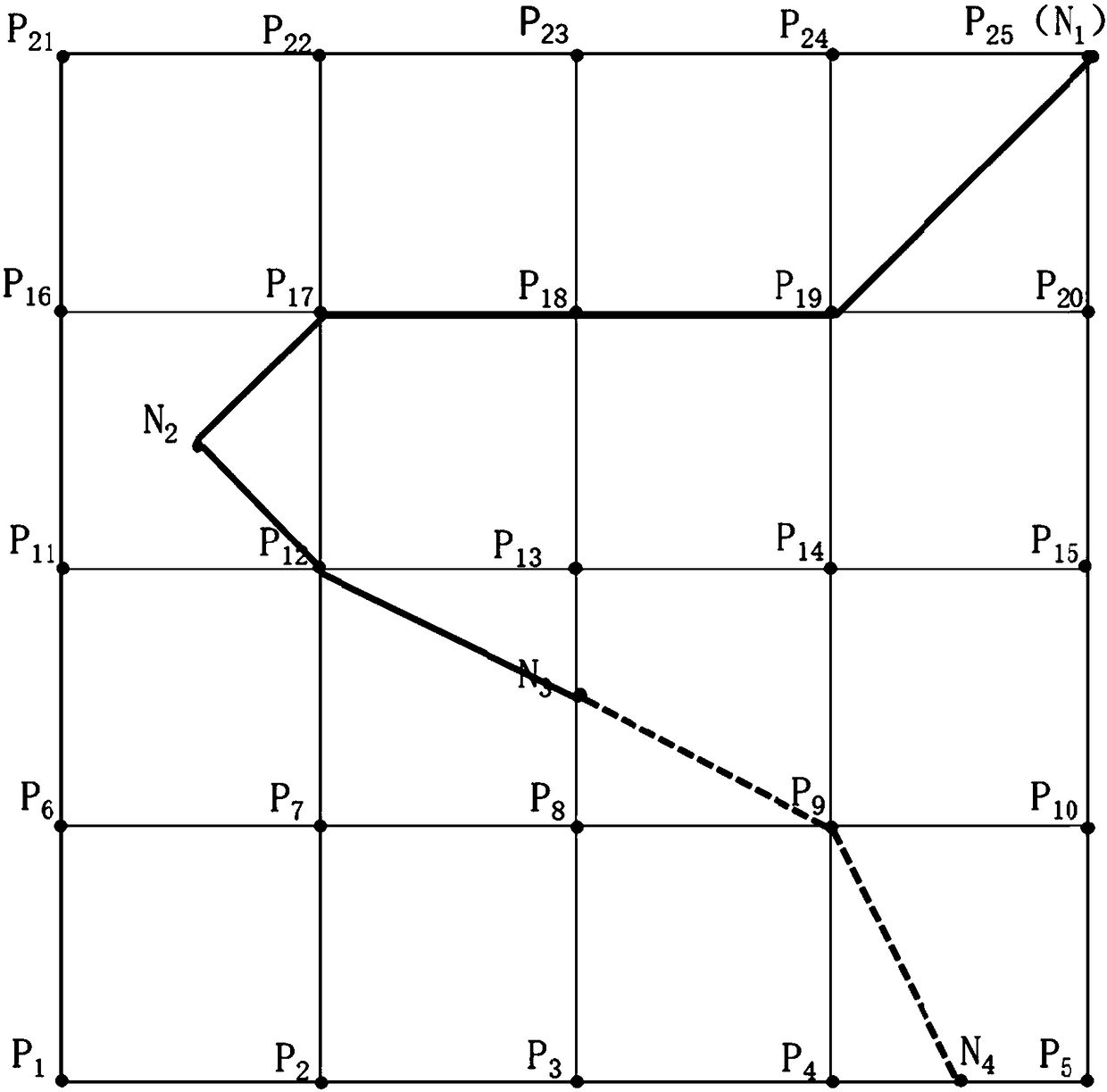
[0031] like figure 2 As shown, a path planning method for unmanned equipment considering energy supply in the present invention, in the scenario where the mobile task of an unmanned equipment is multiple target nodes and there are multiple energy supply sites between each target node; the present invention adopts The sustainable mobile path planning method for unmanned equipment considering energy supply determines the specific movement path when the unmanned equipment continues to obtain mobile tasks; the basic idea is to establish a sliding window for unmanned Into the path planning topology, and through the sliding window and iterative calculation of the path, the movement path of the unmanned device can reduce the path cost and calculation o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More