Omni-directional movable mechanical arm based on visual system
A technology of omnidirectional movement and visual system, applied in the field of engineering equipment, can solve problems such as unreachable effects, and achieve the effects of reducing costs, improving movement, and improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be further described in detail in conjunction with the following specific embodiments and accompanying drawings. The process, conditions, experimental methods, etc. for implementing the present invention, except for the content specifically mentioned below, are common knowledge and common knowledge in this field, and the present invention has no special limitation content.
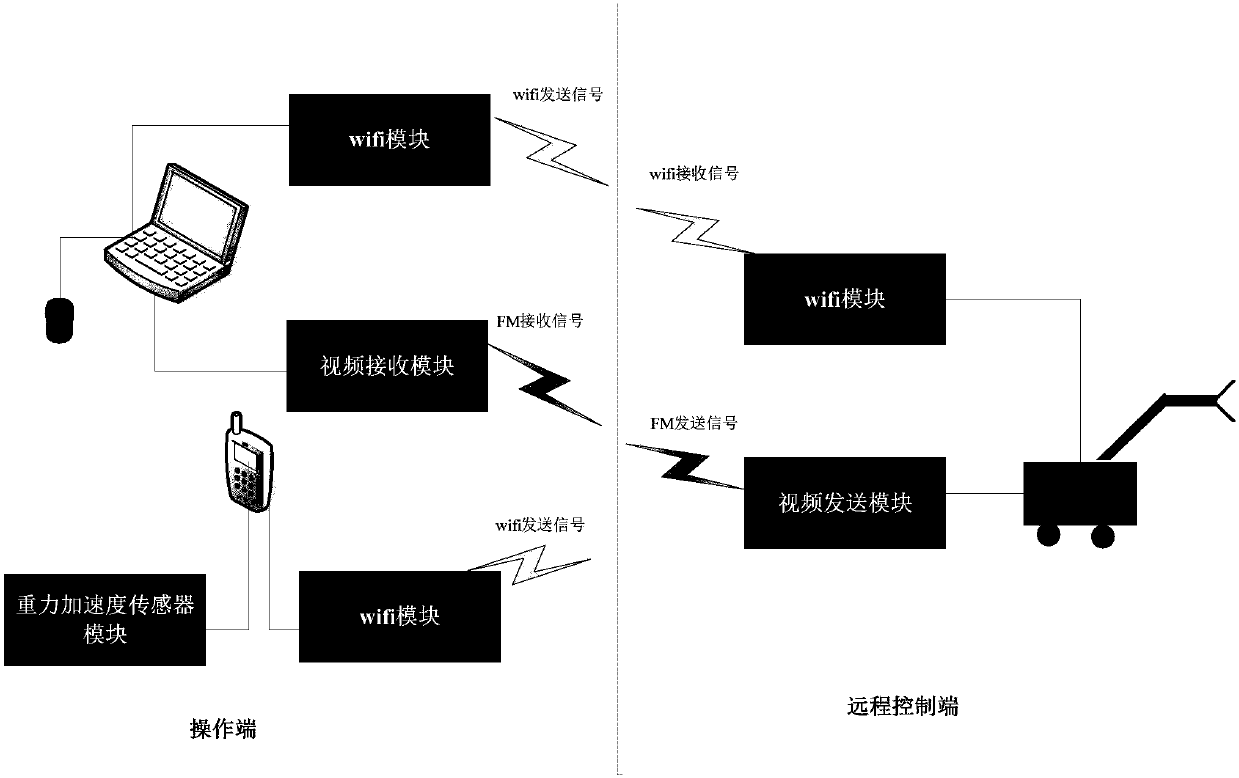
[0071] In a specific embodiment of the present invention, the mobile phone has a built-in gravitational acceleration sensor module and a wifi module, and the operation of the human hand on the mouse remotely controls the movement of the mobile car. To control the action of the mechanical arm mechanism, the keys of the Android application program are written to control the grasping and releasing of the manipulator. A camera is installed on the mechanical arm mechanism to observe the environment around the mechanical arm in real time. The video signal is modulated by FM and d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More