

Multi-AUV formation method based on predictive control under communication limit
A predictive control and controller technology, applied in the field of multi-AUV formation, can solve the problems of not particularly good quality, narrow underwater acoustic communication bandwidth, unfavorable formation formation and formation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0085] The present invention will be further described below in conjunction with accompanying drawings and cases.
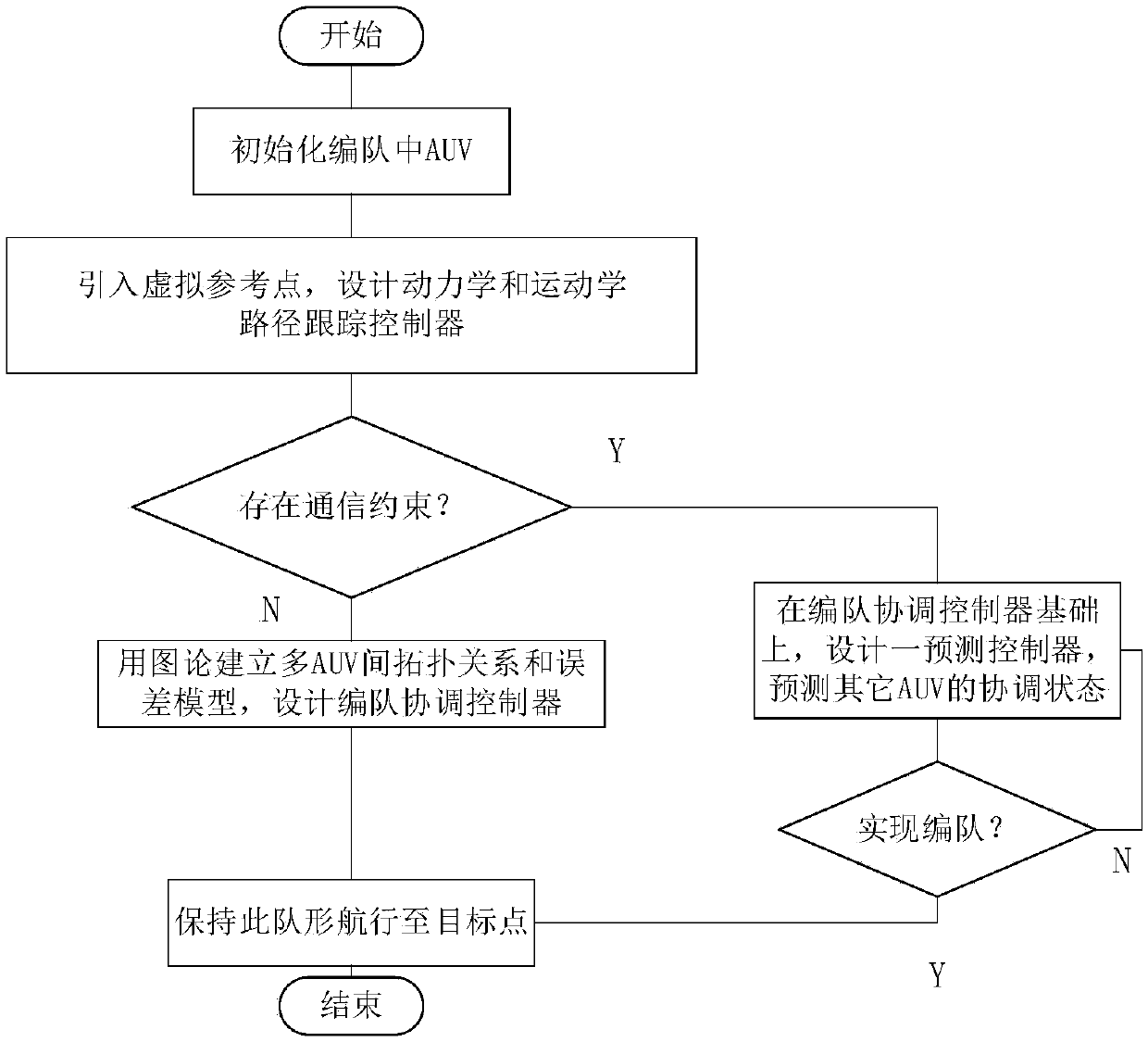
[0086] The process of the present invention is as figure 1 As shown, when the communication condition between multiple AUVs is weak communication, the predictive controller is designed based on the logical communication control strategy, and the coordinated formation is achieved by estimating the coordination state of the AUVs. The communication delay is set in the program as 5s, the follower does not receive the information from the leader until 5s later, and the data packet loss means that all the information within 5s has been lost, the information obtained by the follower is discrete, and the designed predictive controller can predict the information well Estimate and realize the formation formation, which is mainly explained by the time delay situation.
[0087] Step 1: Establish the horizontal plane model of AUV:
[0088]
[0089] in: m ur =m-Y r ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More