

Multi-AUV formation control method based on object function
A technology of objective function and control method, which is applied to the control of finding targets, three-dimensional position/channel control, etc., and can solve problems such as long time consumption, high packet loss rate, and narrow communication bandwidth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
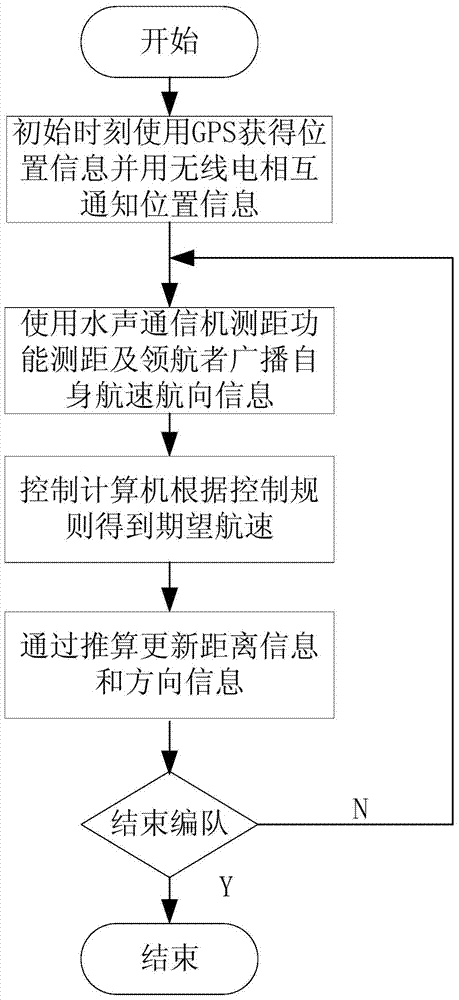
[0059] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
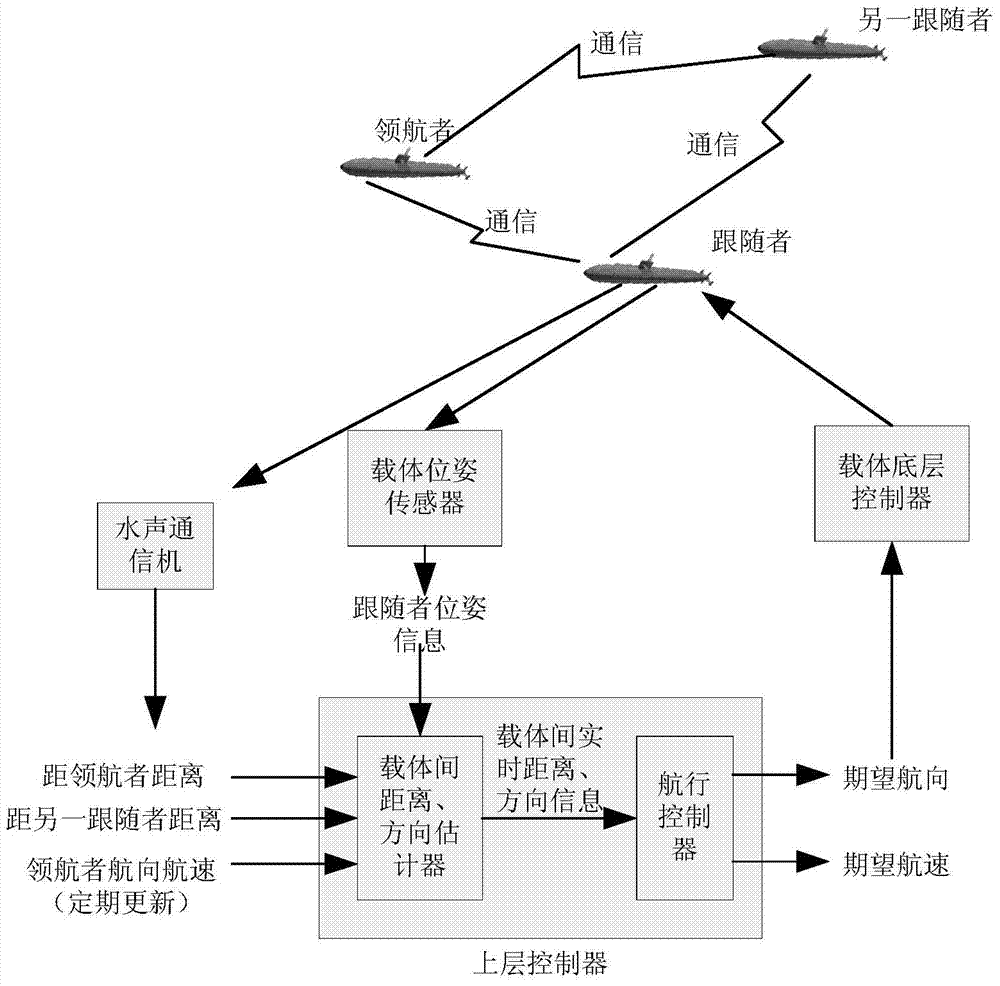
[0060] The present invention is made up of three AUVs, a GPS and a navigation system mounted on the AUV, a radio communication device, an underwater acoustic communication machine and a computer. Such as figure 1 As shown, the following equipment is required:
[0061] Underwater acoustic communicator with ranging function: installed on AUV, used for periodic ranging between underwater robots, and aperiodically sending its own speed and heading information.
[0062] Control computer: used to monitor AUV pose information in real time, calculate relative direction information between AUVs, calculate distance information and direction information between AUVs in real time, and control and give AUV expected speed and expected course according to distance information and direction information between AUVs. The desired speed and heading of the AUV ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More