Binocular camera and laser radar combined robot positioning method
A technology of robot positioning and binocular camera, which is applied in the field of robot positioning combined with binocular camera and laser radar, can solve the problems of less 2D laser environment information and high cost of 3D laser, and achieve accurate outdoor positioning information, consistent scanning frequency, Guaranteeing the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below with reference to the accompanying drawings and examples.
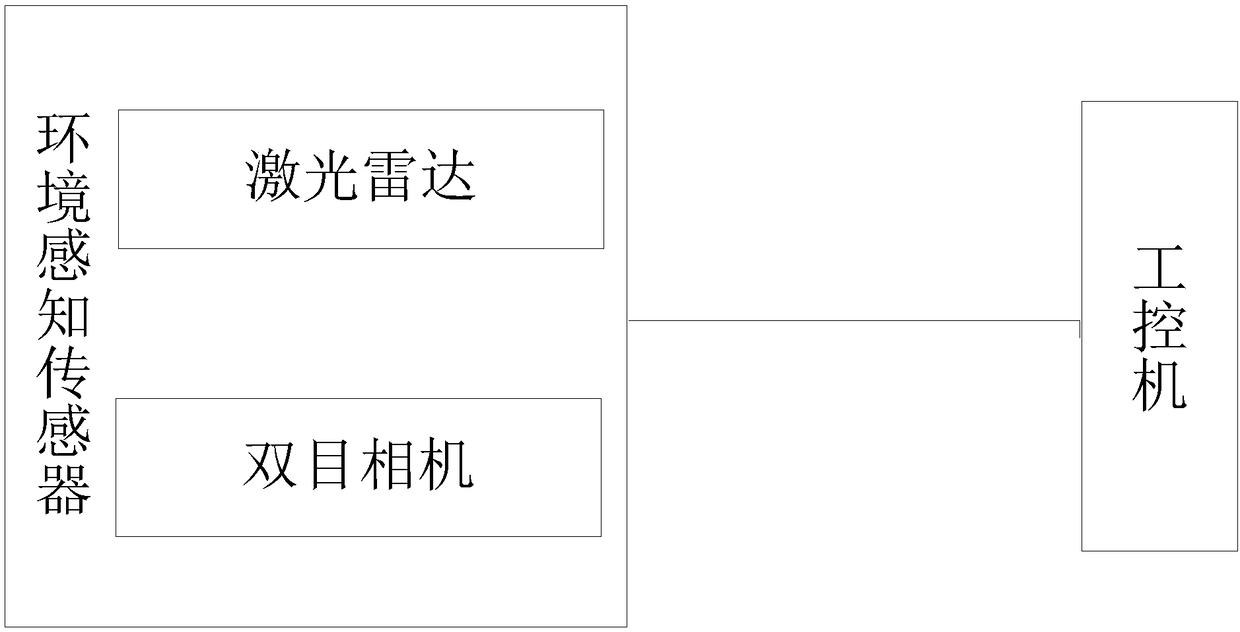
[0022] The invention provides a robot positioning method combined with a binocular camera and a laser radar. As shown in the accompanying drawings, the environment recognition sensor transmits the collected external environment information to the industrial computer and draws an environment map, and judges through mutual cooperation. The pose of the robot itself and whether it moves to the target area can be used to position the robot well through the use of sensor data.
[0023] The environment recognition sensor of the present invention includes: laser radar and binocular camera.
[0024] The specific positioning steps are as follows:
[0025] Step 1: Jointly calibrate the binocular camera and the lidar to obtain the internal and external parameters of the binocular camera and the rotation and translation array of the binocular camera relative to the li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com