

Layered obstacle avoidance control method in target tracking of unmanned aerial vehicle
A target tracking and control method technology, which is applied in the field of layered obstacle avoidance control in UAV target tracking, can solve the problems of poor obstacle avoidance effect of UAV, low efficiency of obstacle avoidance control, and inability to respond in time, so as to reduce the Effects of position uncertainty, improvement of accuracy and efficiency, and reduction of calculation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
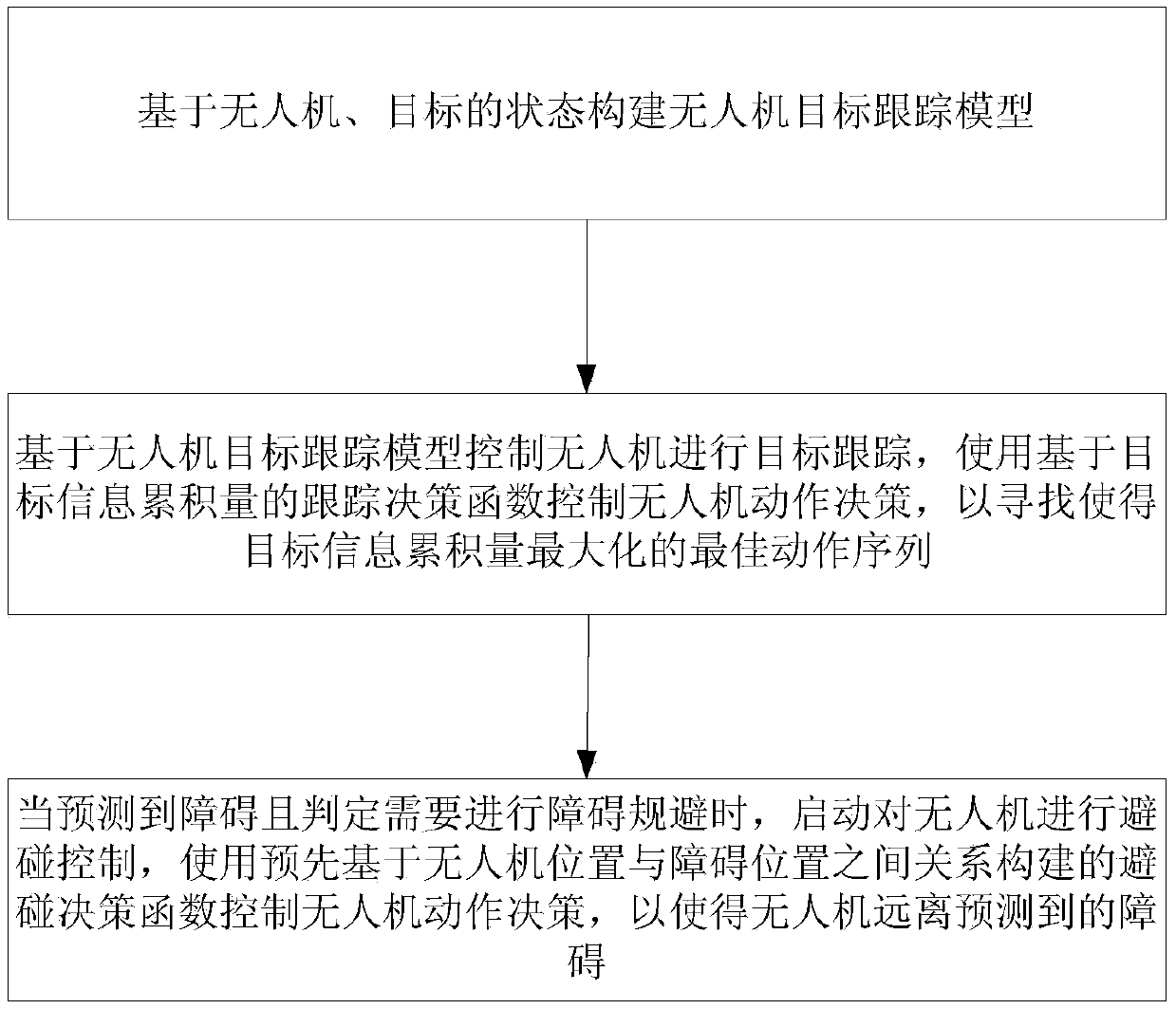
[0052] Such as figure 1 As shown, the layered obstacle avoidance control method in the UAV target tracking in this embodiment, the steps include:
[0053] S1. Construct a UAV target tracking model based on the state of the UAV and the target;
[0054] S2. Control the drone to track the target based on the target tracking model of the drone, and use the tracking decision function based on the accumulation of target information to control the action decision of the drone to find the best action sequence that maximizes the accumulation of target information;
[0055] S3. When an obstacle is predicted and it is determined that obstacle avoidance is required, start collision avoidance control for the UAV, and use the collision avoidance decision function constructed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More