Control method, sweeping robot, terminal and computer readable storage medium
A technology of sweeping robot and control method, which is applied in the direction of non-electric variable control, control/regulation system, two-dimensional position/channel control, etc., which can solve the problems of not too dirty, low working efficiency of sweeping robot, and high power consumption of sweeping robot And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
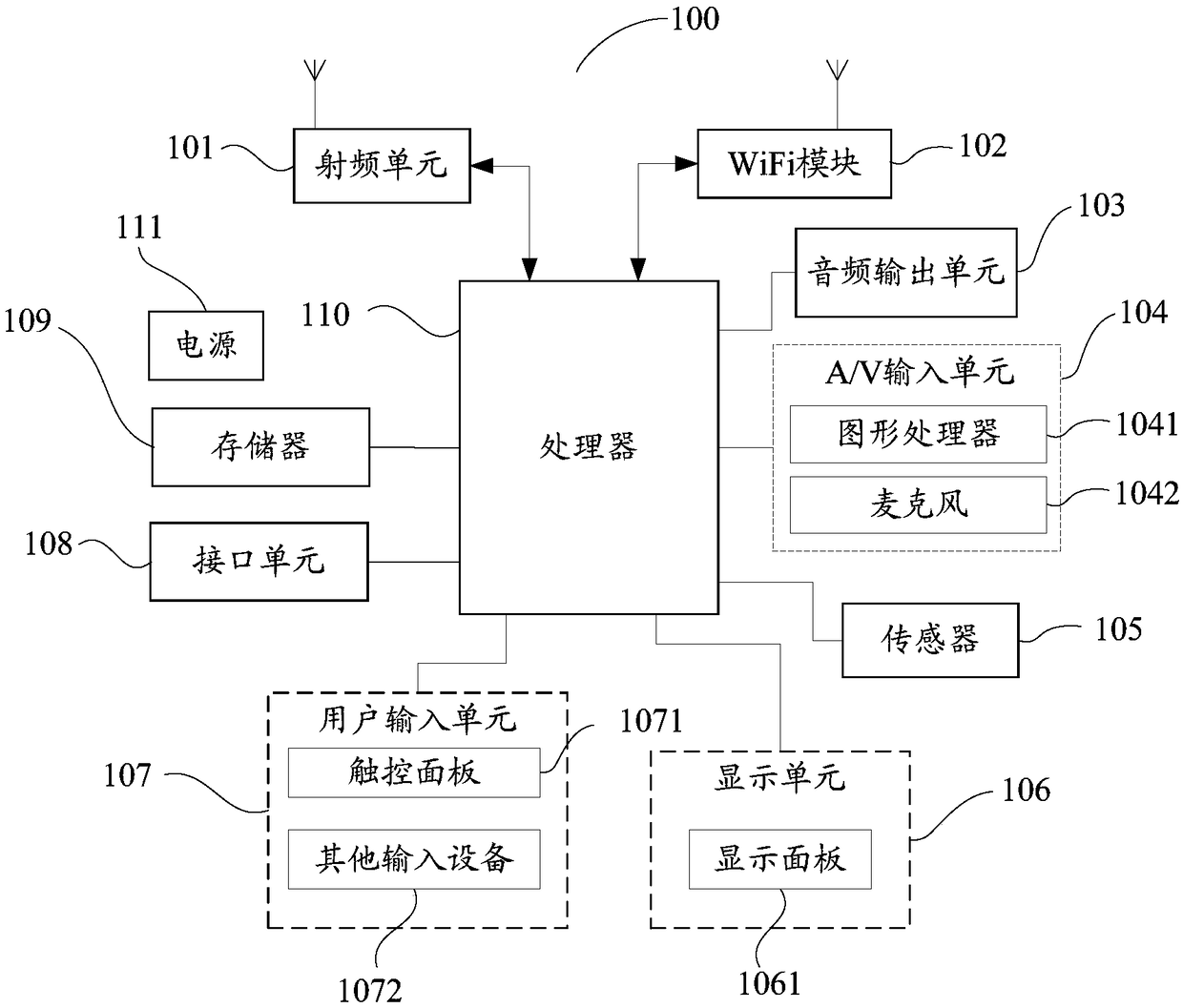
[0067] Based on the foregoing embodiments, embodiments of the present invention provide a control method, which can be applied to a cleaning system, wherein the cleaning system can include: a terminal and a sweeping robot, and the functions implemented by the control method can be respectively passed The processor in the terminal and the sweeping robot invokes the program code to implement, of course, the program code can be stored in a computer storage medium. It can be seen that the terminal and the sweeping robot include at least a processor and a storage medium.
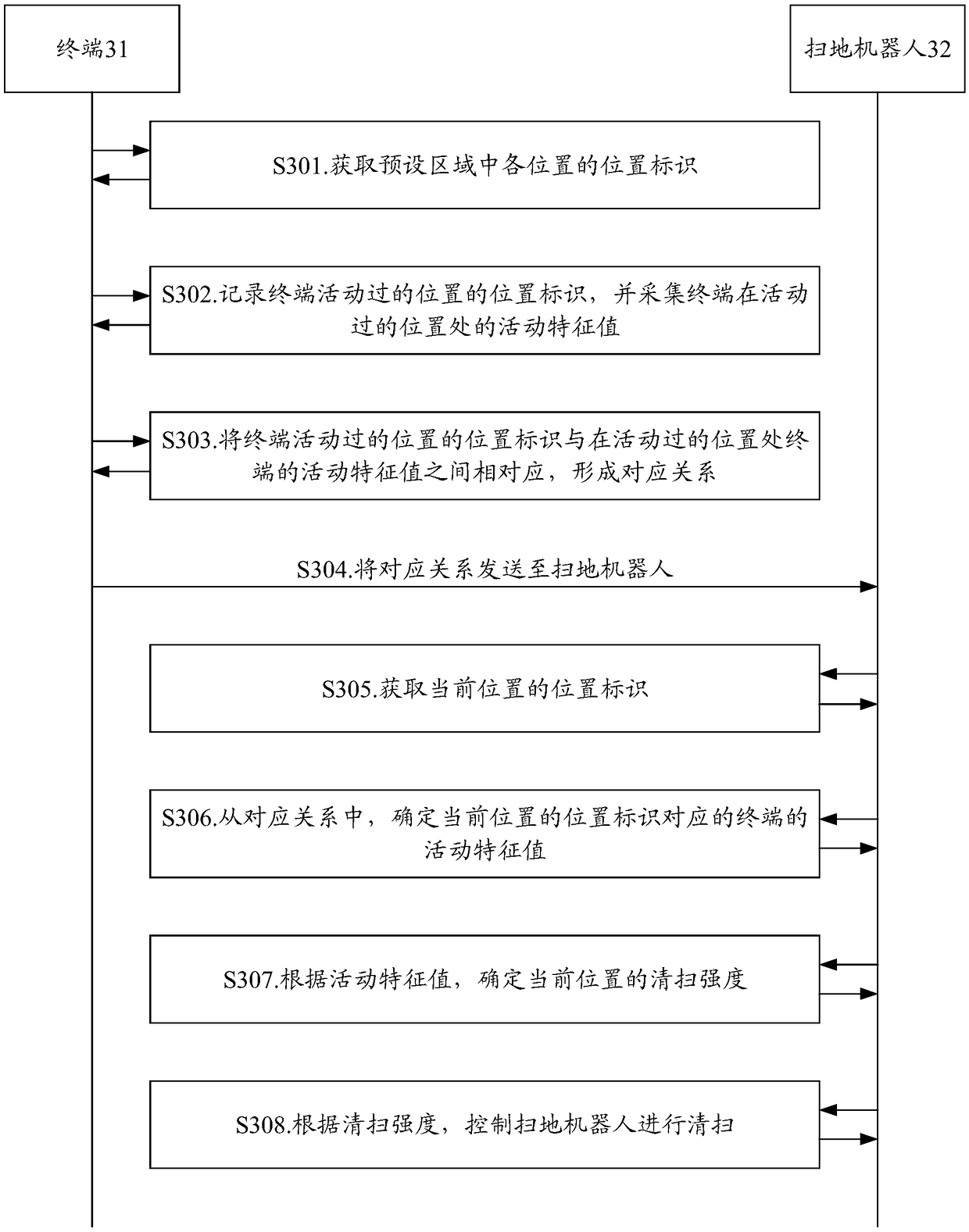
[0068] This embodiment provides a control method, image 3 It is a flowchart interaction diagram of the control method in Embodiment 1 of the present invention, refer to image 3 As shown, the above-mentioned control method may include:
[0069] S301: The terminal 31 obtains the position identification of each position in the preset area;
[0070] Specifically, when the existing sweeping robot performs cleaning...
Embodiment 2
[0092] Based on the foregoing embodiments, this embodiment provides a control method, which can be applied to a sweeping system. The sweeping system can include: a terminal and a sweeping robot. The processor calls the program code to implement, of course, the program code can be stored in the computer storage medium, it can be seen that the terminal and the sweeping robot include at least a processor and a storage medium.
[0093] On the basis of the first embodiment above, in order to obtain the position identification of each position in the preset area, it can be realized in one or more ways, specifically, different position identifications can be used to identify each position of the preset area , where the above location identifier may include:
[0094] A picture of the location or the WiFi signal strength at the location.
[0095] Wherein, for the position identification as a position picture, the terminal can use the camera function to collect pictures at various positi...
Embodiment 3
[0137] Based on the same inventive concept, an embodiment of the present invention provides a sweeping robot, which is consistent with the sweeping robot described in one or more embodiments above.
[0138] This embodiment provides a sweeping robot, Figure 9 It is a schematic structural diagram of the sweeping robot in Embodiment 3 of the present invention, refer to Figure 9 As shown, the sweeping robot includes a processor 91, a memory 92 and a communication bus 93; the communication bus 93 is used to realize the connection communication between the processor 91 and the memory 92; the processor 91 is used to execute the control stored in the memory 92 program to perform the following steps:
[0139] Receive the corresponding relationship sent by the terminal; obtain the location identifier of the current location; from the corresponding relationship, determine the activity characteristic value of the terminal corresponding to the location identifier of the current location...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com