

Wearable flexible auxiliary operating arm
An auxiliary operation and flexible technology, applied in the field of flexible manipulators, can solve the problems of limited range of motion, poor environmental adaptability, invariable stiffness, etc., and achieve the effects of good portability, strong load capacity and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and through specific embodiments.
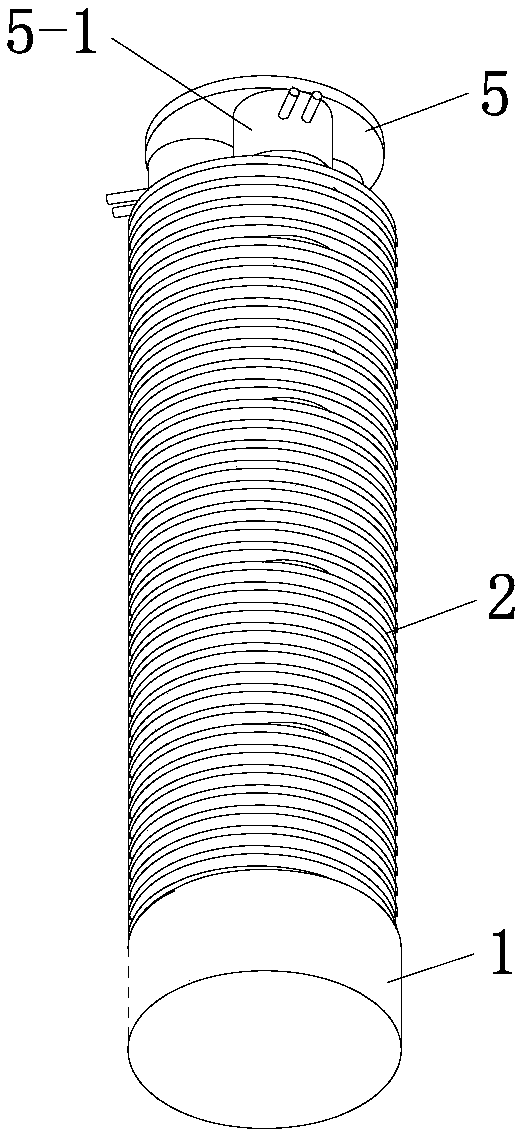
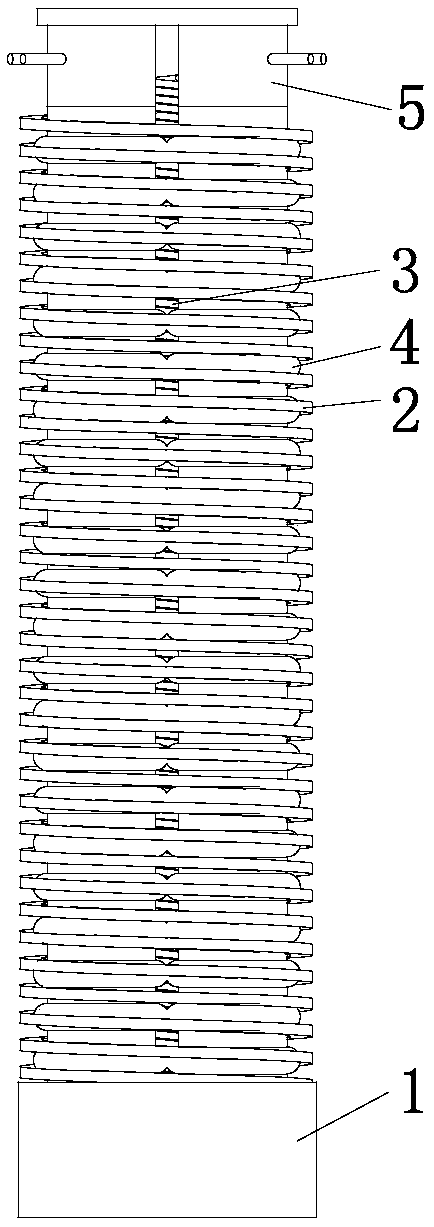
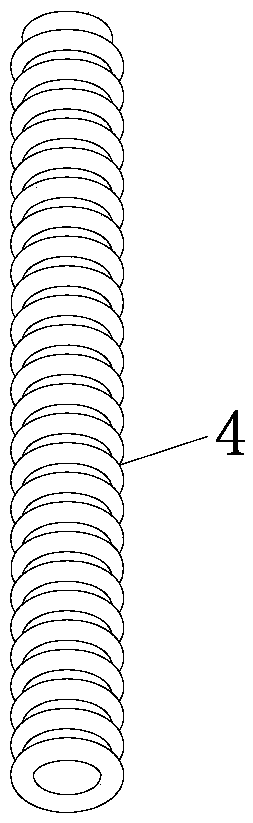
[0023] Such as Figure 1-Figure 4 and Figure 6-Figure 7 As shown, the wearable flexible auxiliary operation arm includes an air chamber cover 5, a base 1, an inner spring 3 and three hollow flexible inflatable conduits 4; the hollow flexible inflatable conduit 4 is a conduit with one end closed and the other open;
[0024] The inner spring 3 is arranged in the middle of the base 1, and three flexible inflatable conduits 4 are arranged circumferentially around the inner spring 3. The closed ends of the flexible inflatable conduits 4 are against the base 1, and the air chamber cover 5 is provided with a flexible inflatable conduit. 4 matched air chambers, the open end of the flexible inflatable conduit 4 is fixed in the air chamber 5-1, and the air chamber 5-1 has an air inlet and an air outlet.
[0025] Base 1 is a 3D print. The func...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More