

Underwater robot movement posture adjusting device and method
An underwater robot and operating attitude technology, which is applied to underwater ships, transportation and packaging, underwater operation equipment, etc. The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
[0048]It should be understood that terms such as "having", "comprising" and "including" as used herein do not entail the presence or addition of one or more other elements or combinations thereof.
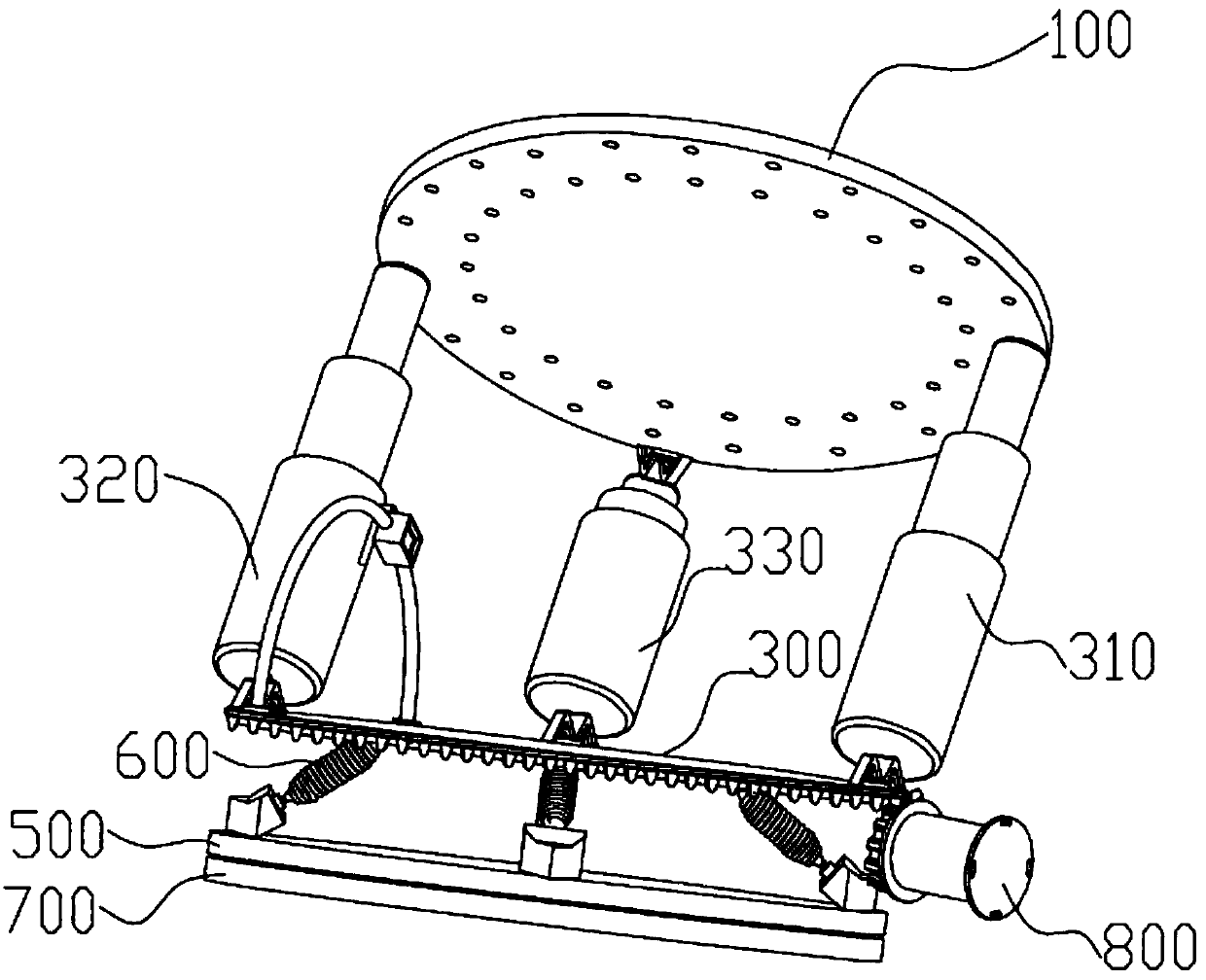
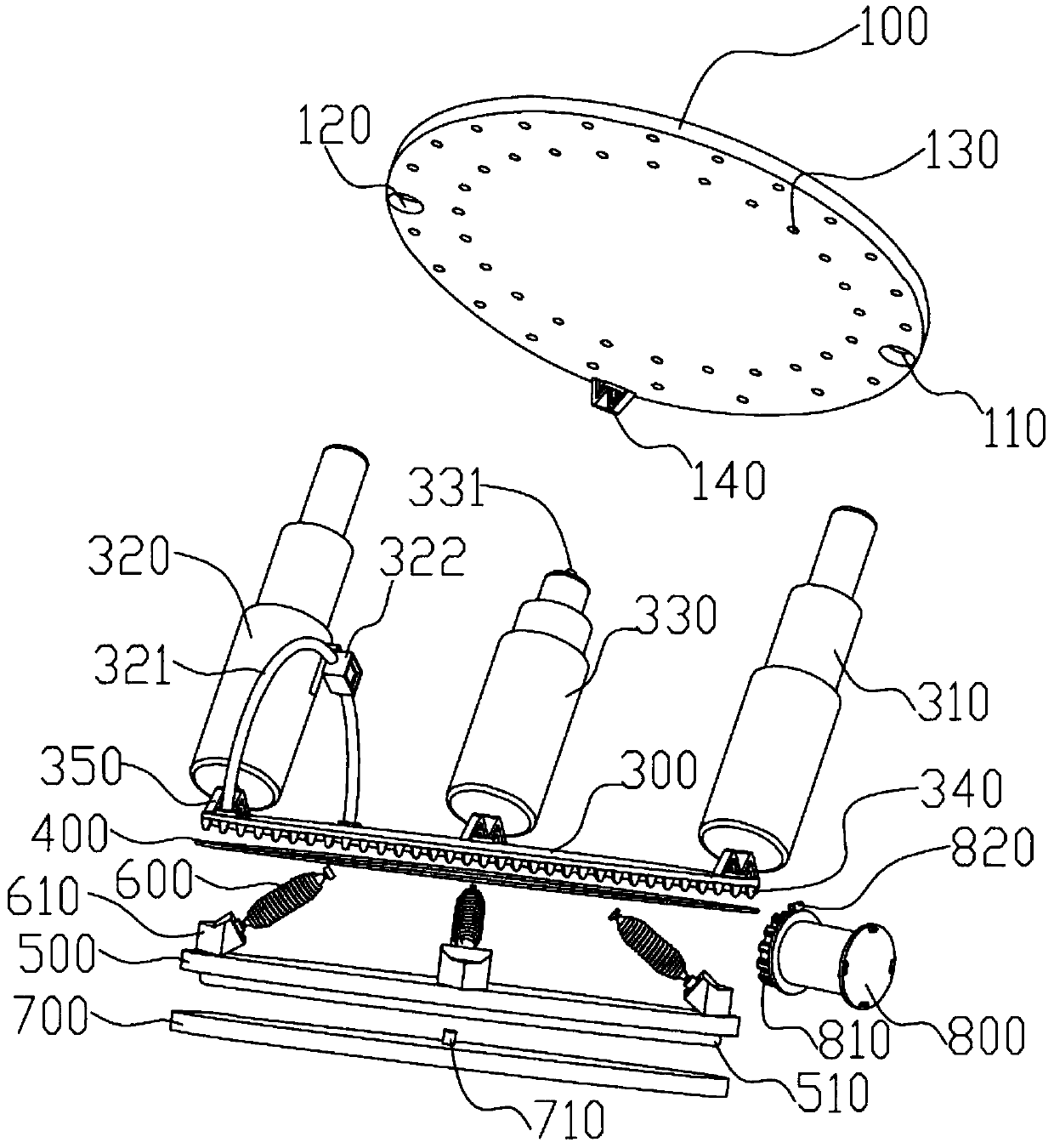
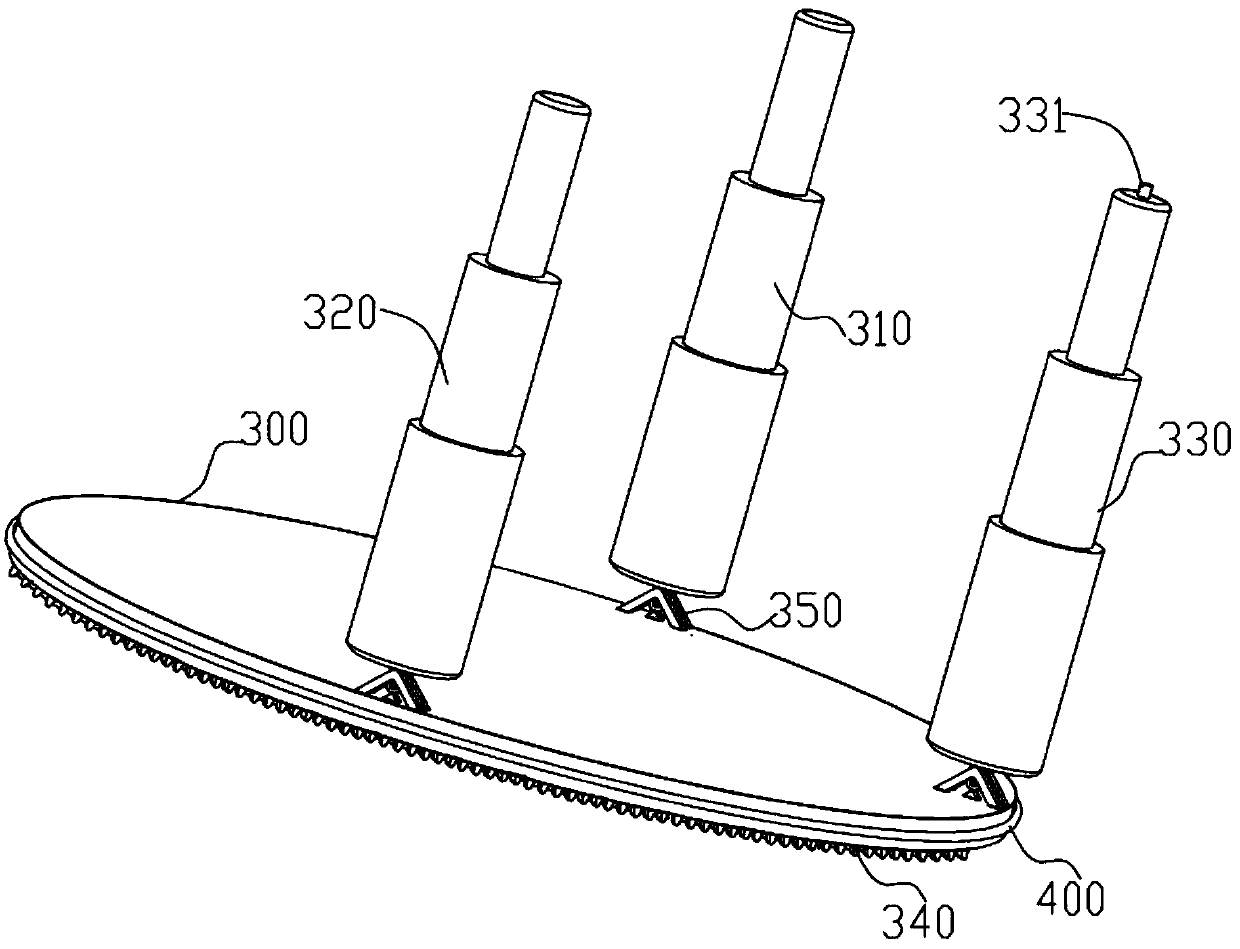
[0049] like Figure 1-4 As shown, a device for adjusting the running posture of an underwater robot, the base 700 is fixedly installed in the robot, preferably, the base 700 is in the center of the robot, and the center of the base 700 is protrudingly provided with a positioning shaft 710, and the positioning shaft 710 is concentric The outer base 700 defines a circular groove for guiding the rotation of the supporting seat 500 .
[0050] A positioning hole is provided at the bottom of the center of the support seat 500, and a slide rail 510 protrudes from the support seat 500 on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More