A matching method for three dimensional laser point cloud data and unmanned aerial vehicle point cloud data
A point cloud data and three-dimensional laser technology, applied in the direction of using optical devices, measuring devices, instruments, etc., can solve the problems of missing point cloud data, inability to fully reflect the characteristic information of the target object, etc., and achieve the effect of reducing data missing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in further detail below with reference to the accompanying drawings and specific embodiments.
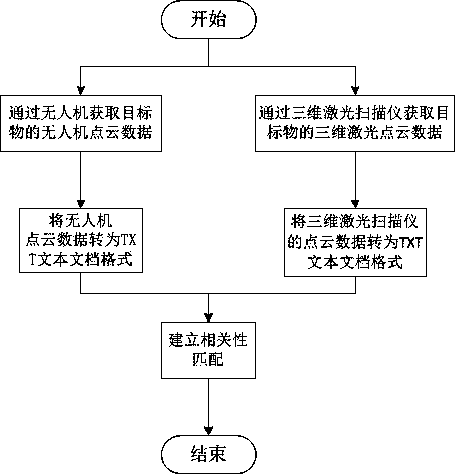
[0024] like figure 1 As shown, in this embodiment, the following steps are included:
[0025] Step S1: obtaining the drone point cloud data of the target through the drone;
[0026] Step S2: obtaining the three-dimensional laser point cloud data of the target through a three-dimensional laser scanner;
[0027] Step S3: Convert the 3D laser point cloud data and the UAV point cloud data into the same format;
[0028] Step S4: Using the drone point cloud data as the reference system and the 3D laser point cloud data as the mobile system, select multiple points with the same name based on the RGB color type based on the 3D point cloud data, and use the global matching method to match the point clouds of the two. Data builds correlation matching.
[0029] like figure 2 As shown, in this embodiment, the three-dimensional laser point clo...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap