

Minimally-invasive operation robot device
A minimally invasive surgery and robot technology, applied in the field of surgical robots, can solve the problems of limited bending degree of the middle arm body and insufficient bending angle of the bending arm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
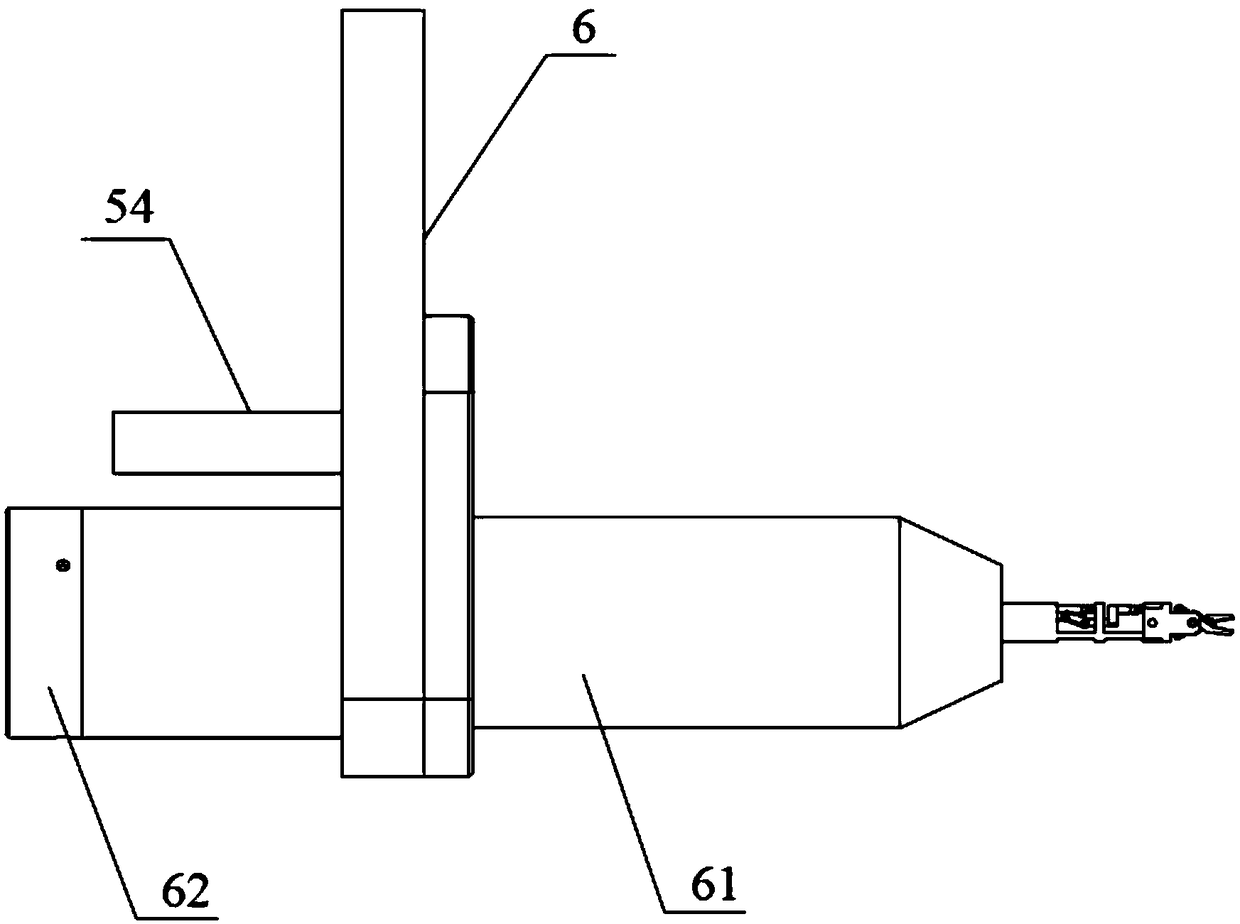
[0032] Such as figure 1 As shown, the present invention provides a robot device for minimally invasive surgery, the manipulator includes a support mechanism 6, a drive mechanism, a control mechanism and a bending arm. Wherein, the drive mechanism includes a fourth drive mechanism 54, the fourth drive mechanism 54, the casing 61 and the end cover 62 are fixed in the support mechanism 6, the casing 61 is connected with the fourth drive mechanism 54 through a gear (not shown), the second The four driving mechanisms 54 drive the casing 61 and the bending arm to rotate together.
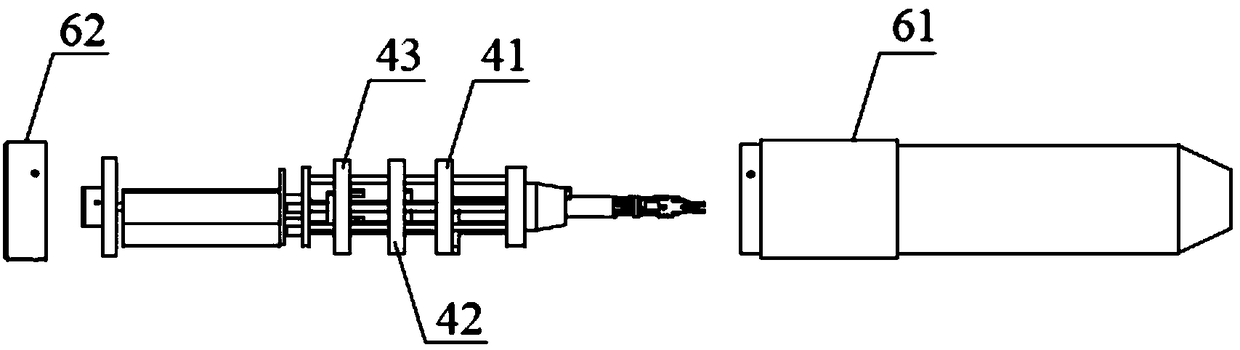
[0033] Such as figure 2 As shown, the end cap 62 is detachably connected to the outer shell 61, so that the inner core connected to the bending arm can be inserted and removed conveniently. The inner core includes a transmi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More