Self-adaptation pre-estimation Kalman filtering algorithm and system for INS/UWB pedestrian navigation with data missing
A technology of pedestrian navigation and filtering algorithm, which is applied in directions such as navigation, navigation, mapping and navigation through speed/acceleration measurement, which can solve the problem that UWB cannot obtain normal distance information.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention is described in detail below in conjunction with accompanying drawing:
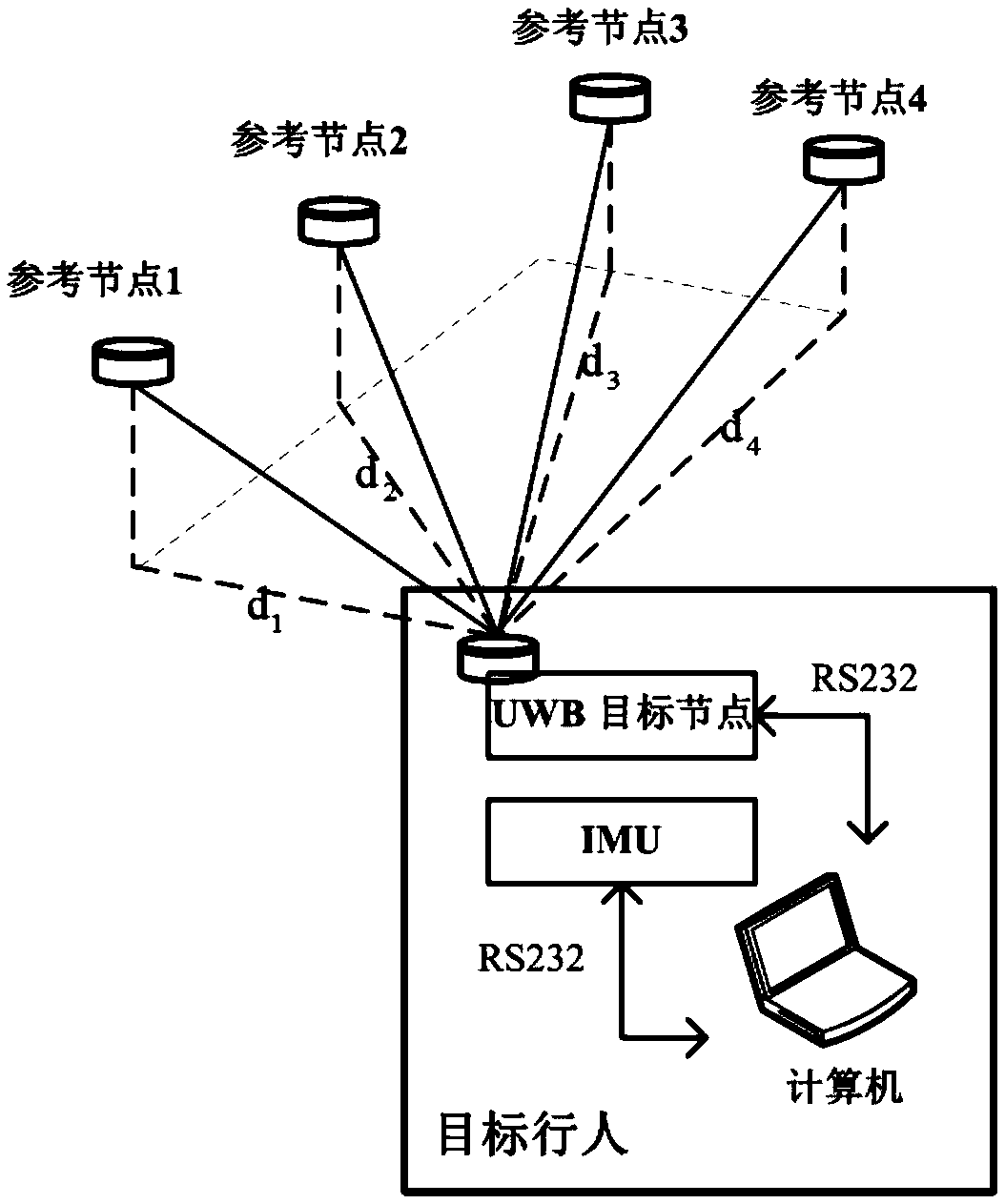
[0049] The realization of an adaptive predictive Kalman filtering algorithm for INS / UWB pedestrian navigation with missing data in the present invention is as follows figure 1 As shown, including: the integrated navigation algorithm uses two navigation systems, UWB and INS, where UWB includes UWB reference nodes and UWB positioning tags, UWB reference nodes are fixed on known coordinates in advance, and UWB positioning tags are fixed on target pedestrians. The INS mainly consists of an IMU fixed on the target pedestrian's foot.
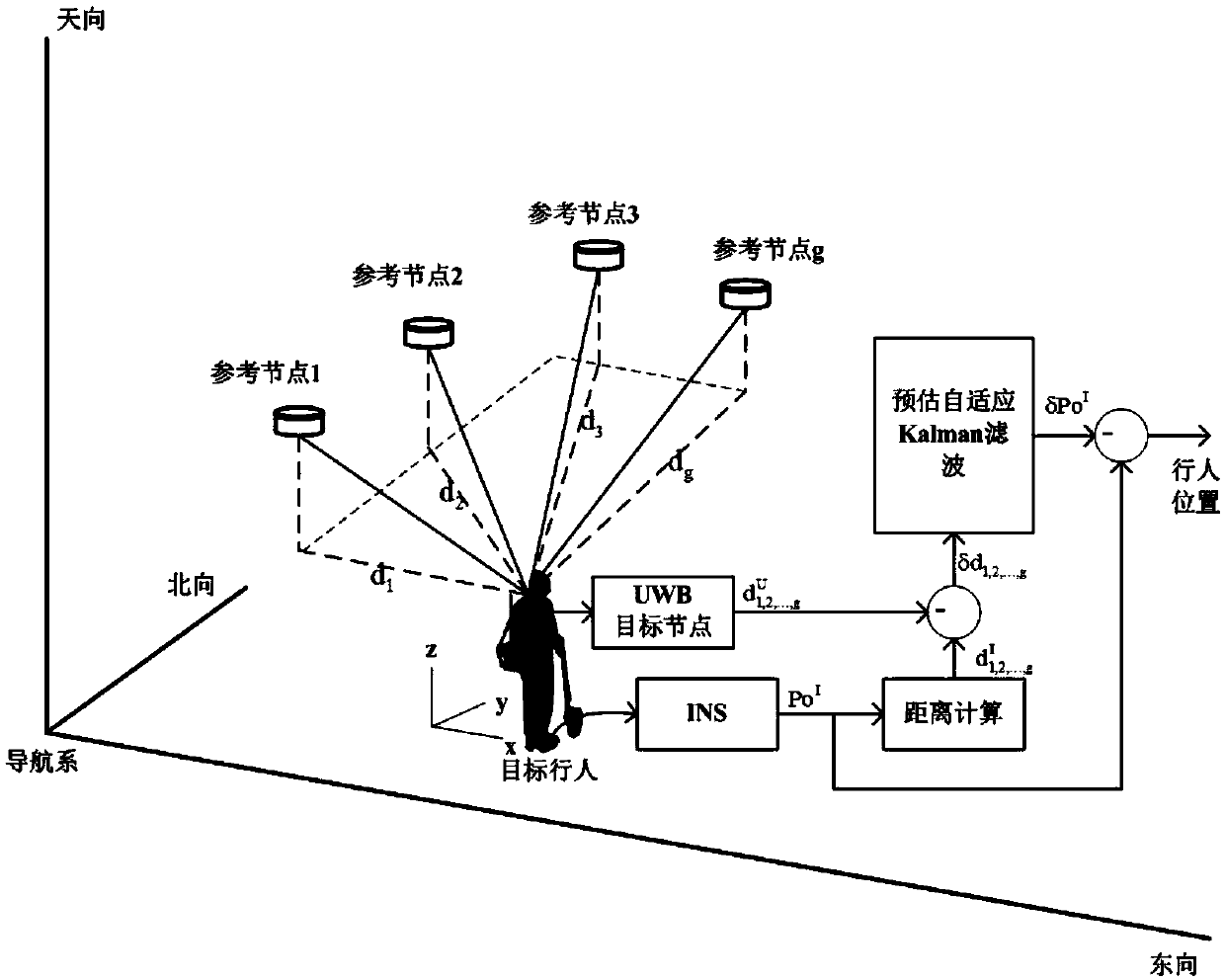
[0050] Based on the above system, the present invention discloses an adaptive estimation Kalman filter algorithm for pedestrian navigation with data missing INS / UWB tight combination, including:
[0051] (1) if figure 2 As shown, the position error, velocity error, attitude error, acceleration error and angular velocity error of the inertial naviga...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com