

Electromagnetic-driven rapid telescopic robot
An electromagnetic drive and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as slow operation speed and inability to meet speed benefit requirements, and achieve fast operation speed, meet speed benefit requirements, and compact structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
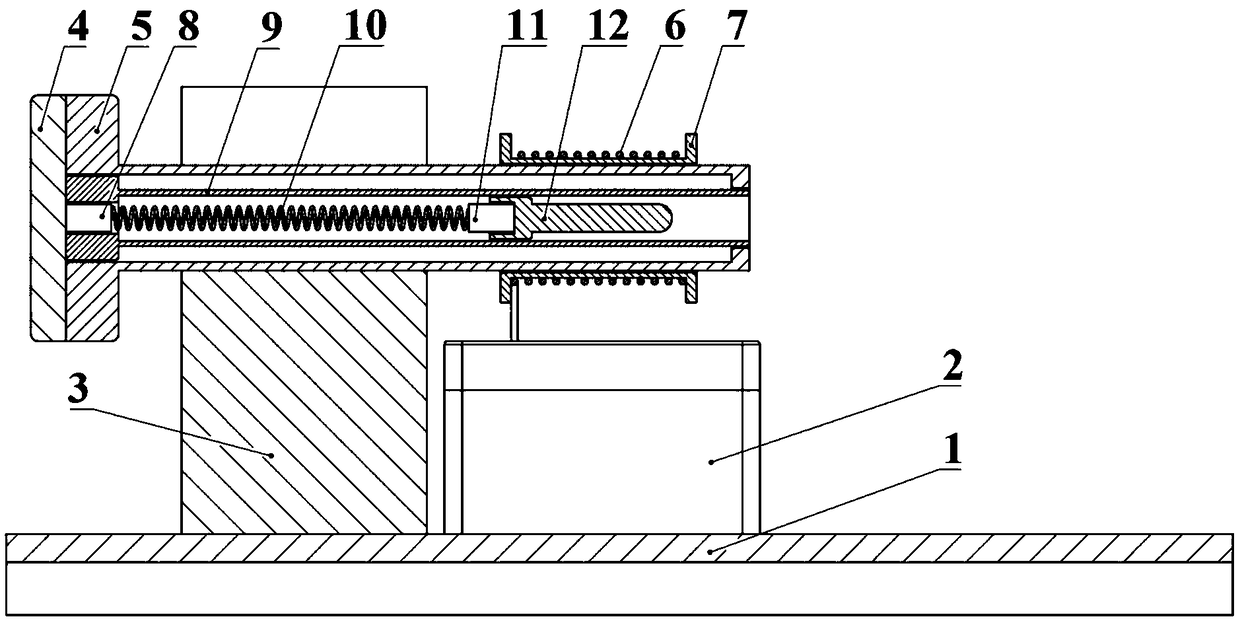
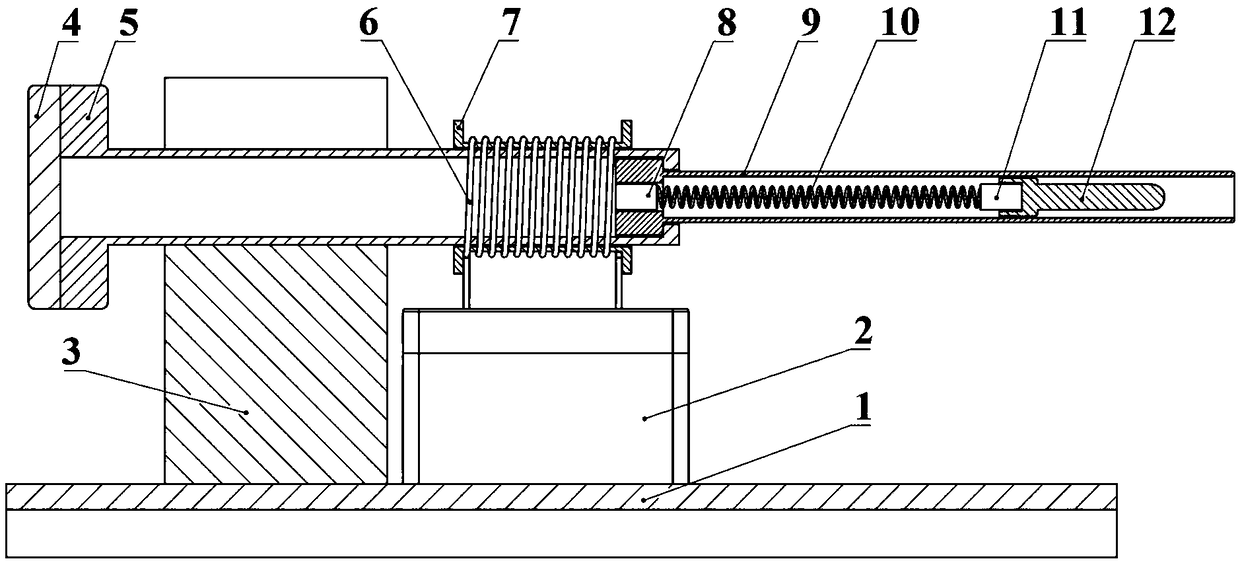
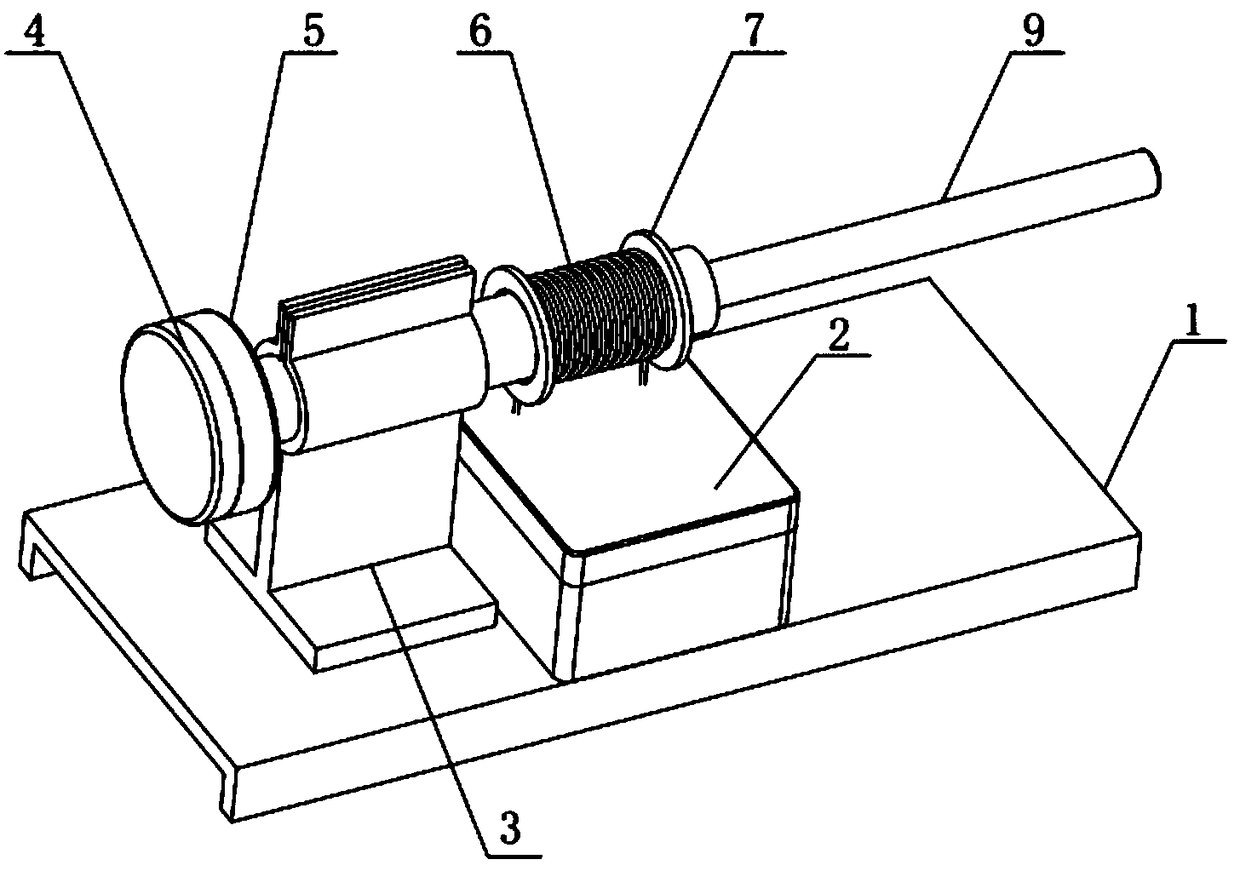
[0025] like figure 1 As shown, the electromagnetically driven fast telescopic robot of this embodiment includes a drive mechanism and a telescopic mechanism. The drive mechanism includes a base 1, an external adjustable power supply 2 and a bracket 3 are fixedly installed on the base 1, and the bracket 3 is fixed with An outer sleeve 5, one end of the outer sleeve 5 is connected with an end face baffle 4, and the other end is provided with a circular opening, the outer sleeve 5 is covered with a coil holder 7, and the coil holder 7 is wound with an energized coil 6. The coil 6 is connected to the external adjustable power supply 2; the telescopic mechanism includes an inner sleeve 9 nested and installed in the outer sleeve 5, the inner sleeve 9 slides along the outer sleeve 5, and passes through a circular opening, and the inner sleeve 9 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More