

Robot control method, device and system
A control method and robot technology, applied in the field of devices and systems, and robot control methods, can solve problems such as error-prone, low performance efficiency, and wasting a lot of time practicing music scores, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0041] According to an embodiment of the present invention, an embodiment of a method for controlling a robot is provided. It should be noted that the steps shown in the flowcharts of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and, Although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
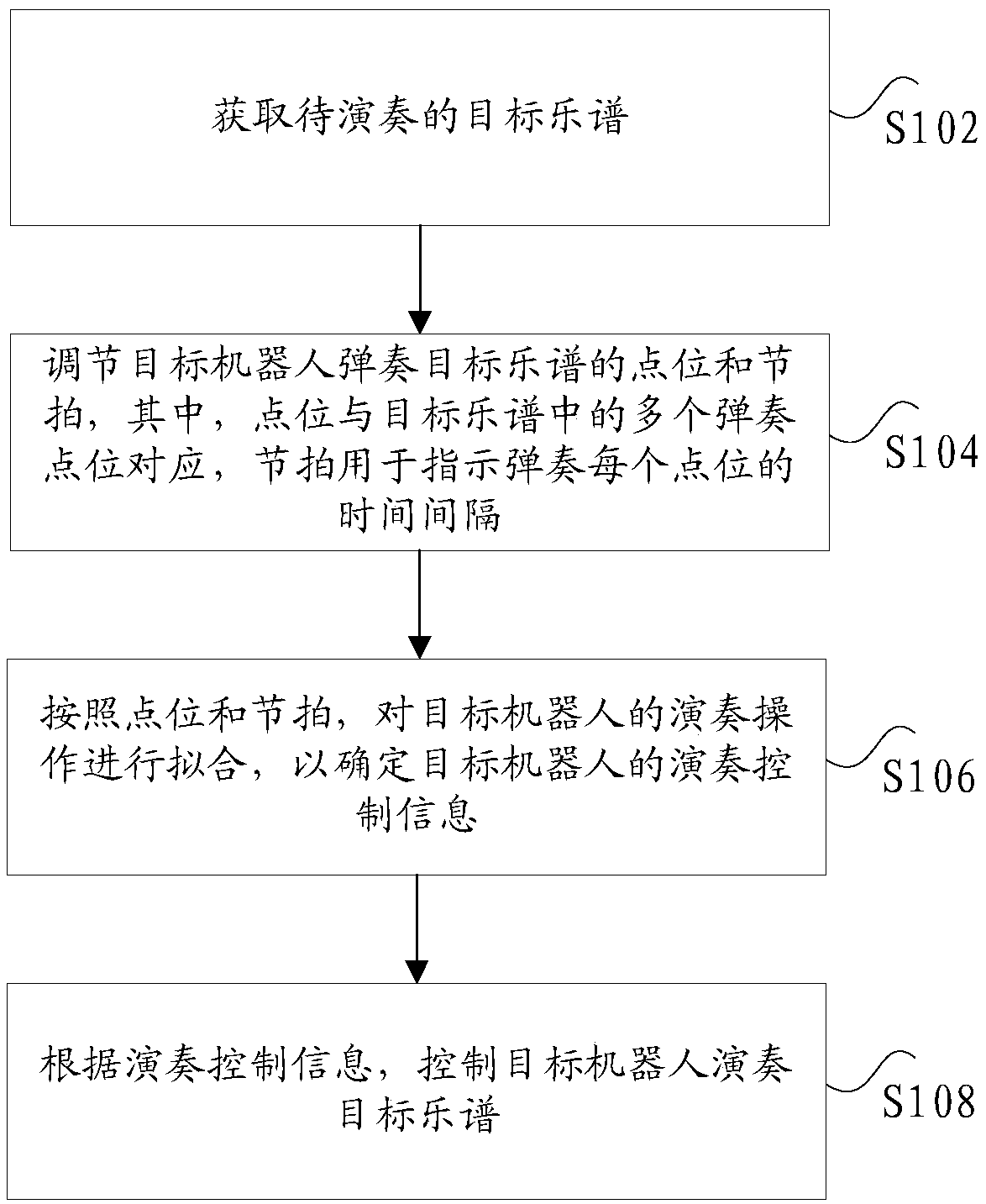
[0042] figure 1 is a flow chart of an optional robot control method according to an embodiment of the present invention, such as figure 1 As shown, the method includes the following steps:
[0043] Step S102, acquiring the target score to be played.
[0044] Optionally, the above-mentioned target score to be played may be selected by the user or the enterprise according to its own situation, and the number and type of the target score are not limited in the embodiment of the present invention.
[0045] It ...
Embodiment 2
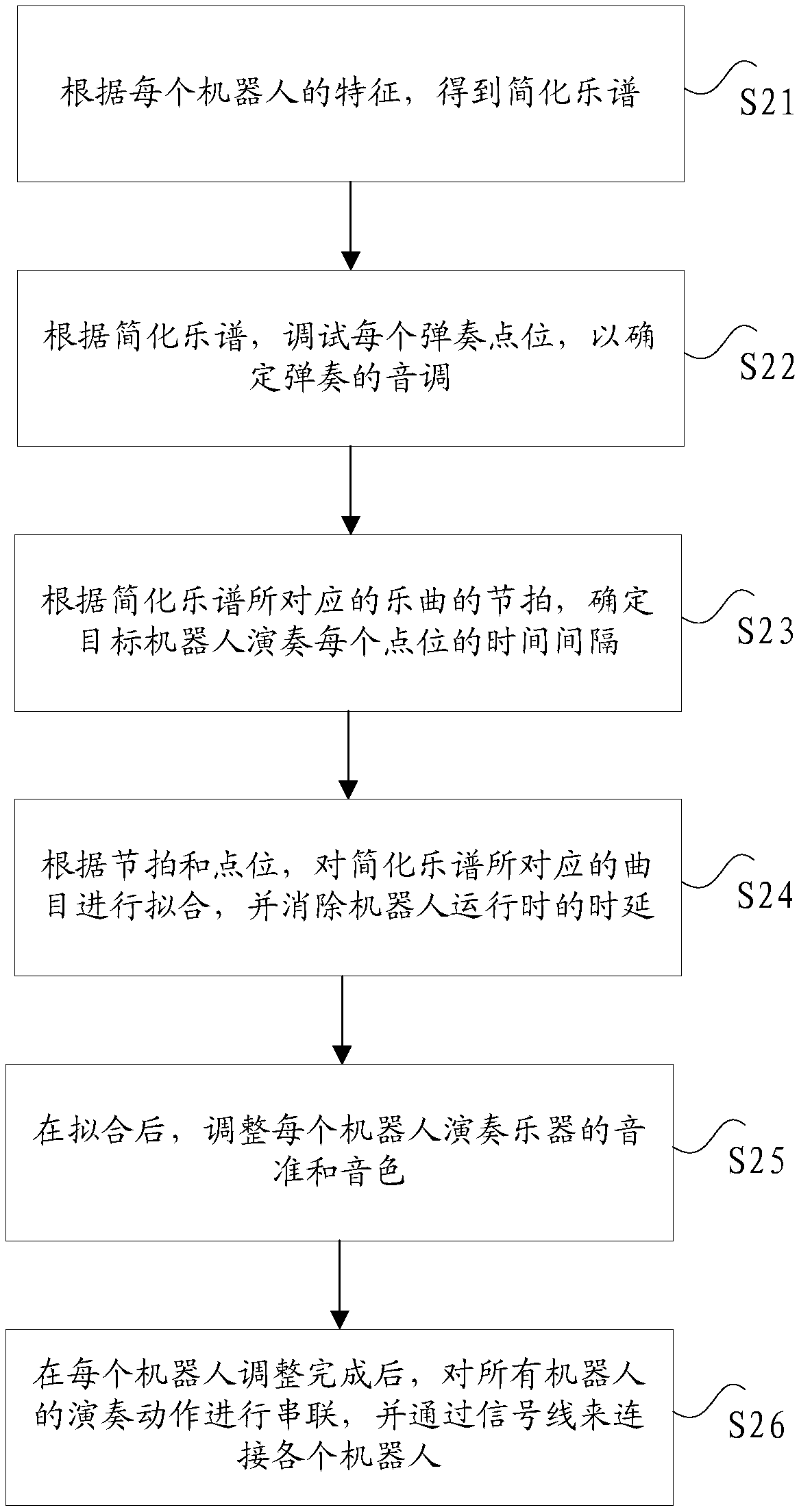
[0068] figure 2 is a schematic diagram of another optional robot control method according to an embodiment of the present invention, such as figure 2 As shown, there is provided a method for a robot to play various musical instruments by designing simple fixtures, the method comprising:
[0069] S21. Obtain a simplified score according to the characteristics of each robot.
[0070] S22. According to the simplified music score, each playing point is adjusted to determine the playing tone.
[0071] S23. Determine the time interval for the target robot to play each point according to the beat of the piece of music corresponding to the simplified score.
[0072] S24, according to the beat and point, fit the track corresponding to the simplified score, and eliminate the time delay when the robot is running.
[0073] S25, after the fitting, adjust the intonation and timbre of each robot playing the musical instrument.
[0074] S26. After the adjustment of each robot is complet...
Embodiment 3
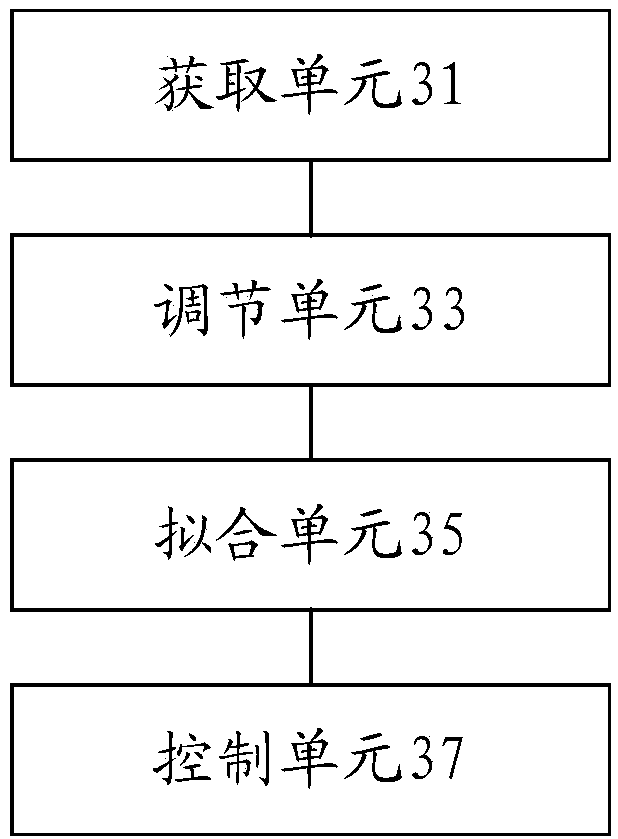
[0078] image 3 is a schematic diagram of an optional robot control device according to an embodiment of the present invention, such as image 3 As shown, the control device includes: an acquisition unit 31, an adjustment unit 33, a fitting unit 35, and a control unit 37, wherein,
[0079] The acquiring unit 31 is configured to acquire the target score to be played.
[0080] The adjustment unit 33 is used to adjust the point and beat of the target robot playing the target score, wherein the point corresponds to multiple playing points in the target score, and the beat is used to indicate the time interval of playing each point.
[0081] The fitting unit 35 is used for fitting the performance operation of the target robot according to the point and beat, so as to determine the performance control information of the target robot.
[0082] The control unit 37 is configured to control the target robot to play the target score according to the performance control information.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More