

Method for planning paths on basis of ocean current prediction models
A technology for path planning and prediction model, applied in climate sustainability, instrumentation, water resource assessment, etc., can solve problems such as poor real-time performance and complex calculation process, and achieve the effect of accelerating convergence speed and reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment 1
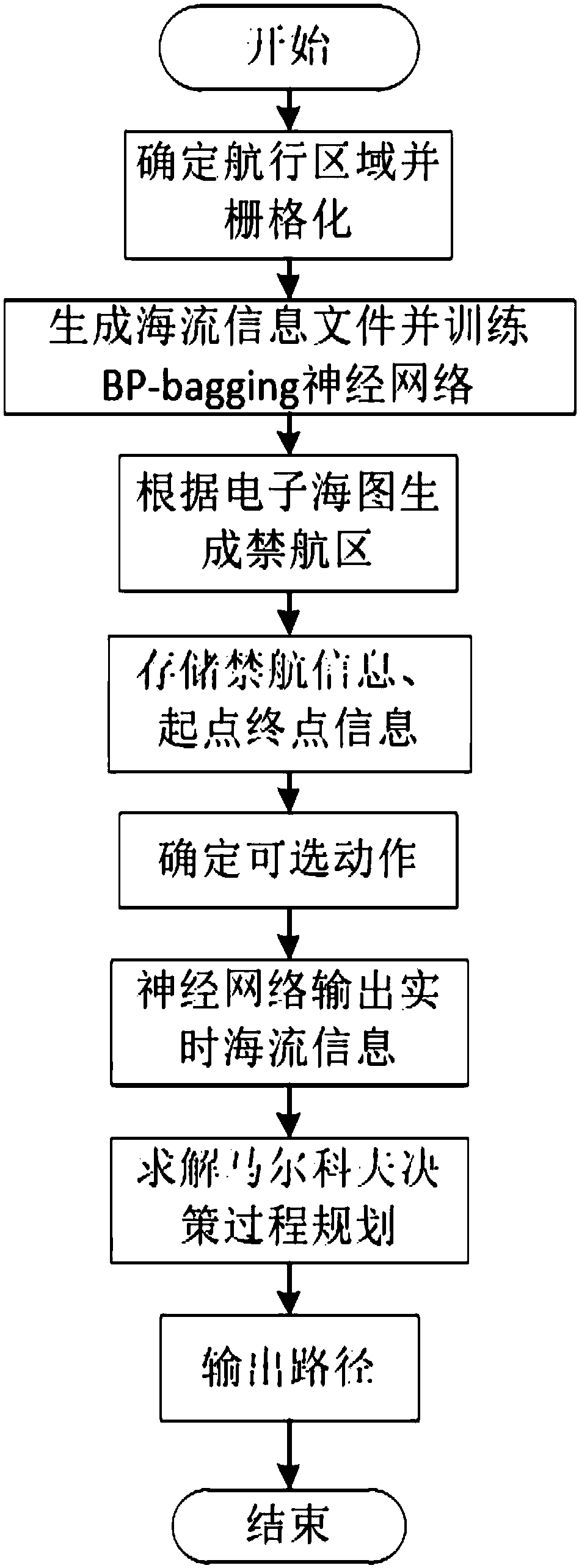
[0046] Such asfigure 1 , a path planning method based on the ocean current prediction model, including the following steps:
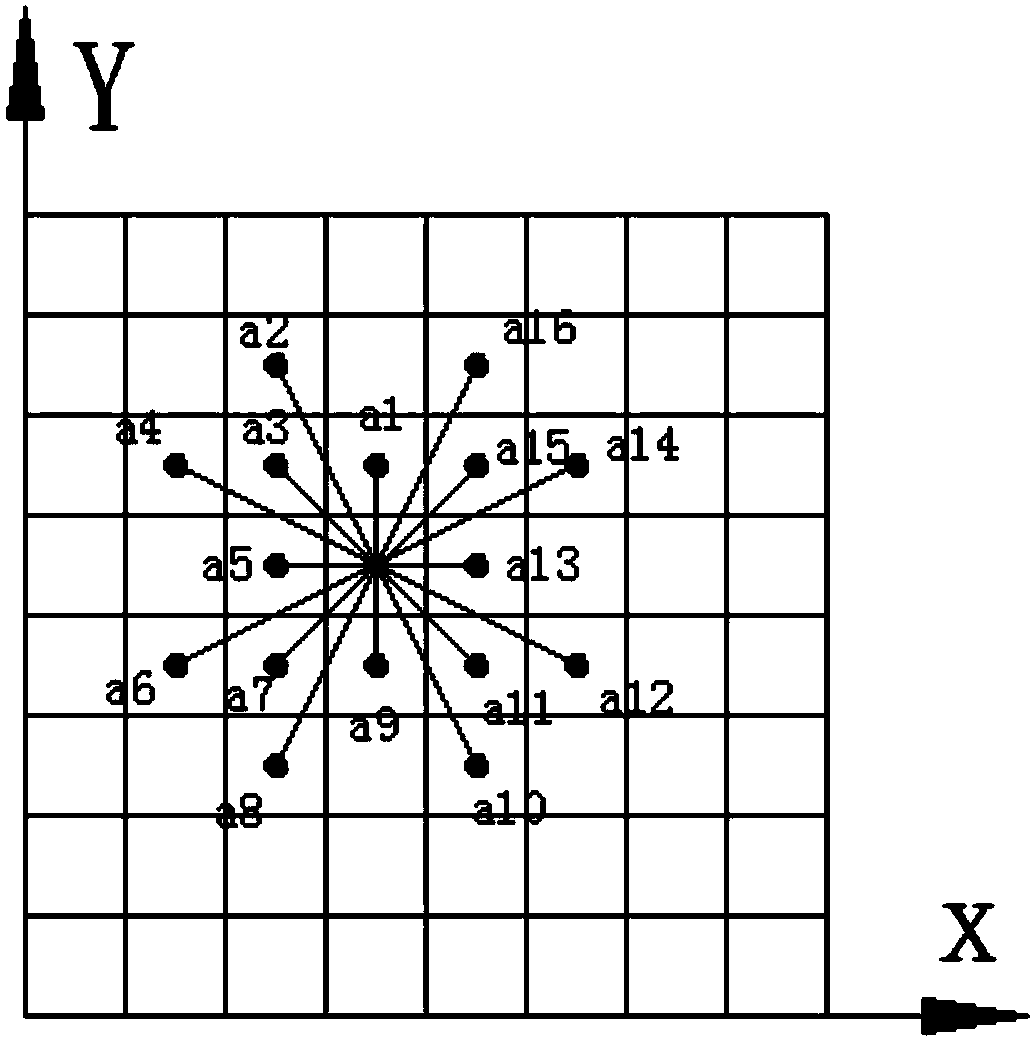
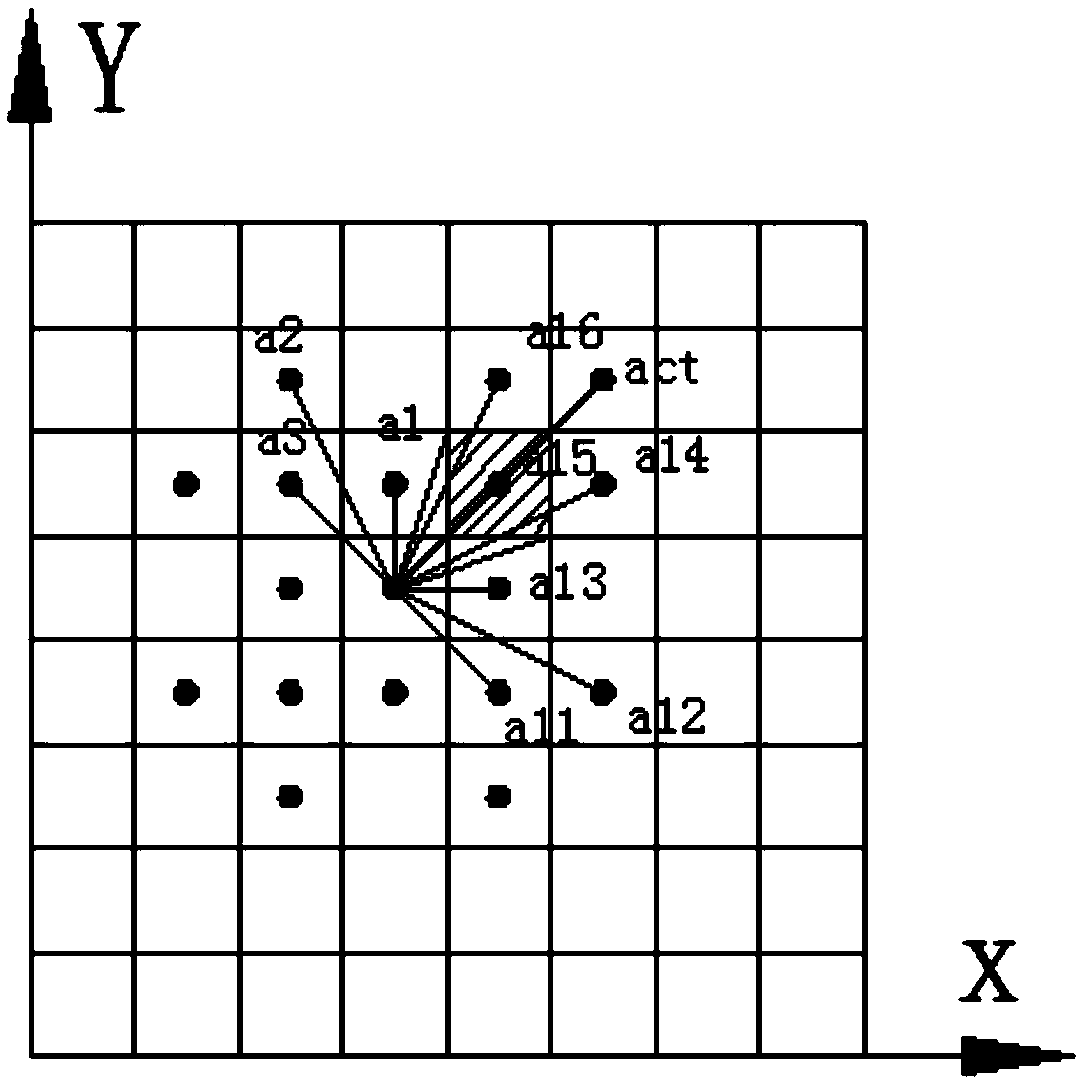
[0047] Step (1): Determine the navigation area according to the key points of the path, and perform grid processing on the navigation area;
[0048] The rectangular navigation area is determined according to the starting and ending points of the path of the underwater robot; the orthogonal curve grid is used in the horizontal direction, the grid spacing is set at 2km to 30km, and 20 to 30 layers are divided into equal depths in the vertical direction.
[0049] Step (2): Use the regional ocean model to predict the ocean current with a time step of ΔT in the navigation area, and use the bagging algorithm and BP neural network to fit and calculate Get real-time ocean current information:
[0050] The vertical direction adopts the σ coordinate, and the vertical coordinate scale is controlled at [-1,0] through the vertical transformation function and the st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More