

Multi-joint industrial mechanical arm backstepping finite time sliding mode control method
An industrial machinery, time-limited technology used in adaptive control, general control systems, control/regulation systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
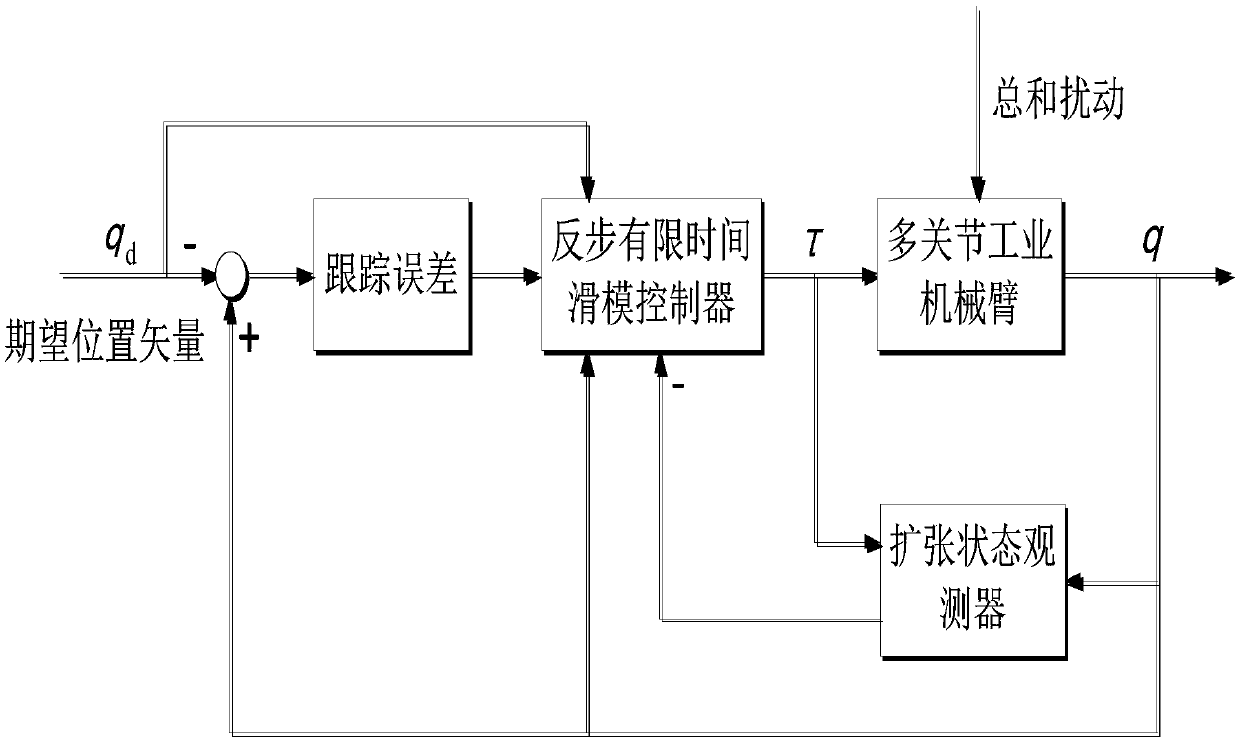
[0065] like figure 1 — Figure 5 As shown, the multi-joint industrial manipulator backstepping finite-time sliding mode control method is characterized in that it includes the following steps:
[0066] (1) Establish a multi-joint industrial manipulator system model, the specific process is as follows:
[0067] For the n-joint industrial manipulator system, if the influence of dynamics, friction and disturbance is considered, the dynamic model can be expressed as:
[0068]
[0069] In formula (1), represent the position, velocity and acceleration vector of the joint respectively; M(q)∈R n×n is the positive definite inertia matrix of the system; is the centrifugal force and Coriolis force matrix; G(q)∈R n is the gravity term vector acting on the joint; τ∈R n is the control torque vector, which represents the driving torque acting on each joint...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More