Linear active disturbance rejection tracking control method for industrial manipulator with disturbance and time delay
A linear active disturbance rejection, industrial machinery technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as system instability, control information can not be updated in time, data loss, etc., to eliminate Effects of System Disturbances
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
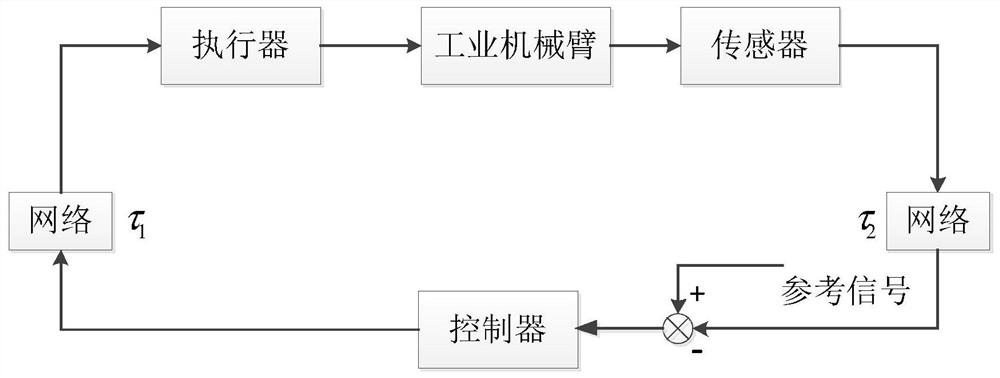
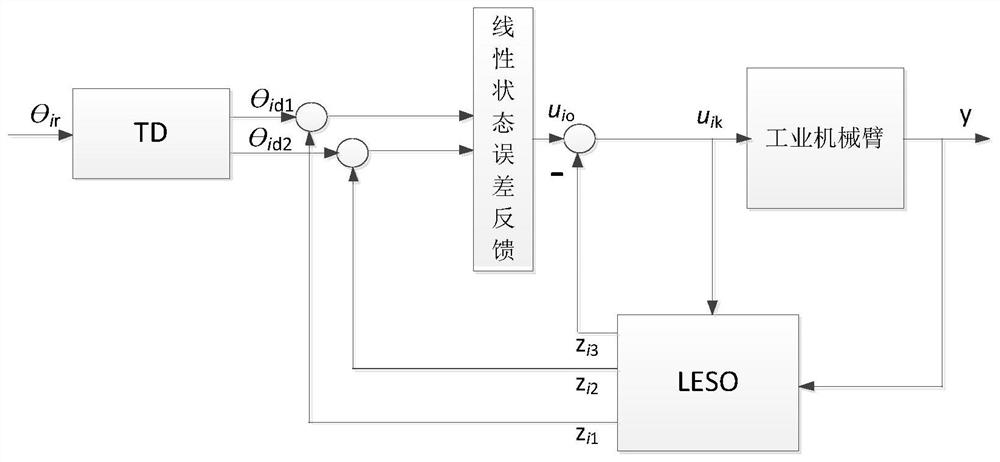
[0057] Such as figure 1 , figure 2 As shown, the linear active disturbance rejection tracking control method for industrial manipulators with disturbance and time delay includes the following steps:
[0058] (1) Establish a mathematical model of the industrial manipulator control system including time delay and interference:
[0059] (1.1) For the n-joint industrial manipulator system, considering the unmodeled dynamics of the system, the influence of external bounded disturbance and friction force, its dynamic model can be described as the following equation:
[0060]
[0061] In the formula, θ, Represent the position vector, velocity vector and acceleration vector of each joint angle of the manipulator, R represents the real number field; M(θ)∈R n×n is the positive definite symmetric inertia matrix of the system; is the centrifugal force an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More