Trajectory prediction method and device
A trajectory prediction and trajectory technology, applied in transportation and packaging, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problem of low vehicle trajectory accuracy, lack of training network interpretability, and neglect. problems such as time continuity in driving situations to achieve the effect of ensuring time continuity and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] In order to make the purpose, features and advantages of the present invention more obvious and understandable, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described The embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without making creative efforts belong to the protection scope of the present invention.
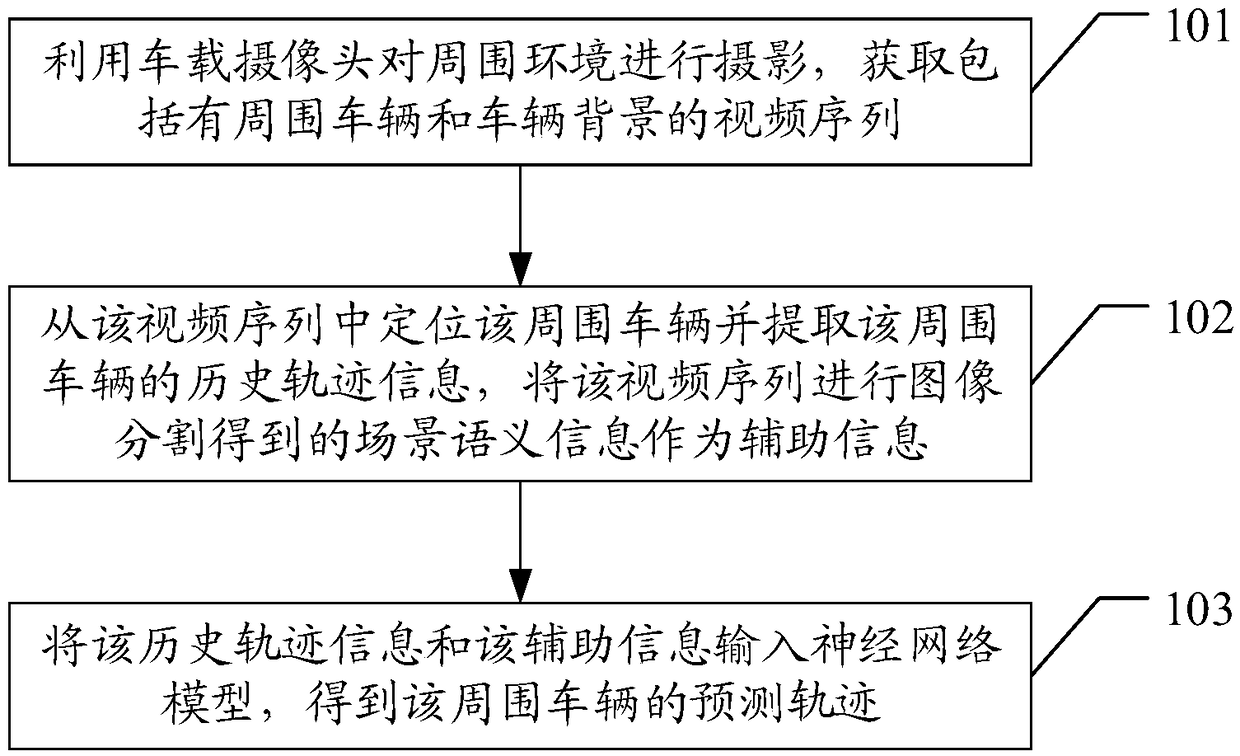
[0014] see figure 1 , figure 1 It is a schematic diagram of the implementation flow of the trajectory prediction method provided by the first embodiment of the present invention, and the method is applied to a vehicle equipped with a vehicle-mounted camera. Such as figure 1 As shown, the trajectory prediction method mainly includes the fol...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap