

A clustering method based on fuzzy c-means dot traces
A mean value and clustering technology, applied in instruments, measuring devices, using re-radiation, etc., can solve problems such as poor tracking effect and achieve high fault tolerance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
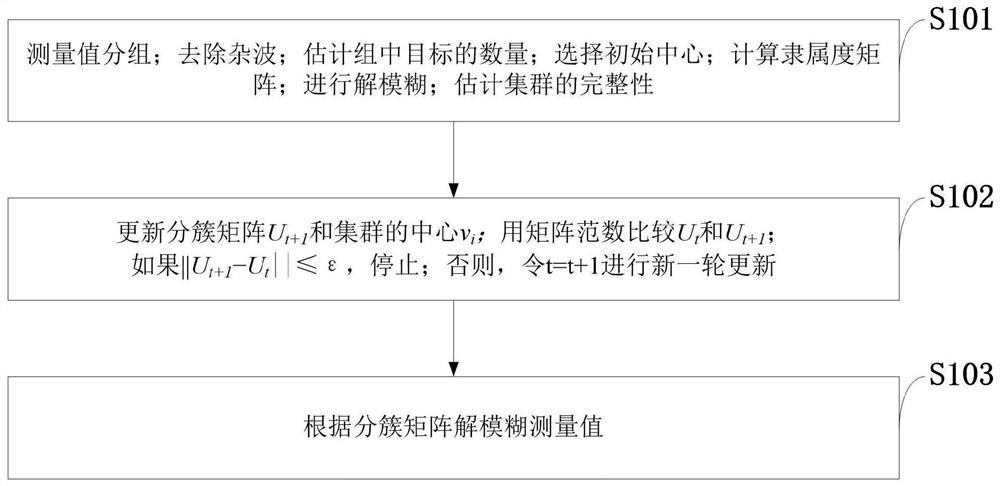
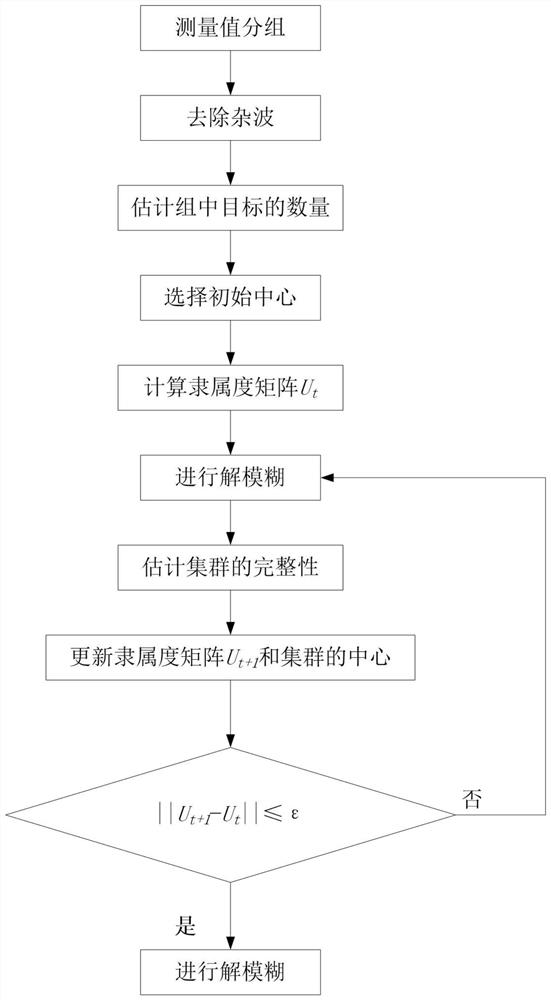
[0083] When the targets are denser, the measurement values of multiple targets will be relatively close, and may be divided into one cluster during clustering, which will cause large errors in estimating the number of targets and estimating target parameters. Coupled with the false alarm measurements generated by nearby electromagnetic interference, it is difficult to meet the requirements. like figure 1 As shown, the fuzzy C-means-based clustering method provided by the embodiment of the present invention specifically includes the following steps:
[0084] (1) Grouping of measured values
[0085] According to the predicted value of the target, some elliptical wave gates are defined in the detection area, each target corresponds to an elliptical wave gate, and the measured value in the elliptical wave gate indicates that the measured value may be generated by the target at this moment. Suppose there are N k Tracks exist in the kth frame, resulting in a possible coincidenc...
Embodiment 2
[0120] The method for clustering based on the fuzzy C-mean point trace provided by the embodiment of the present invention is the same as that of Embodiment 1, and the specific steps of estimating the number of targets in the group described in step (3) are as follows:
[0121] Suppose the possible value of the target number c in a group is c 1 , c 2 ,...,c m and c 1 ≤c 2 ≤...≤c m . The number of targets predicted at these elliptical gates is c 0 . The measurement rates of the targets are respectively γ 1 , γ 2 , ..., γ c0 , the number of measurements produced by the target can be viewed as a Poisson distribution. Therefore, the target number is equal to c i The probability estimate of is:
[0122]
[0123] If P(c i ) is not greater than the constant threshold, then discard c i . For the efficiency of the algorithm, the selected partitions with small probability will be discarded. Then, the remaining selection partitions are calculated step by step.
Embodiment 3
[0125] The method for clustering based on the fuzzy C-mean point trace provided by the embodiment of the present invention is the same as that of the embodiment 1-2, and the specific steps of selecting the initial center described in step (4) are as follows:
[0126] Suppose that after clutter removal, there are m measurements p k 1 , p k 2 ,...,p k m exists in the group. c 0 The predicted position of each target is p′ k 1 , p′ k 2 ,...,p' k c0 , γ min , γ max is the target measurement rate γ 1 , γ 2 , ..., γ c0 the minimum and maximum values. When the predicted position and the measured value agree well, the predicted position is taken as the initial center. The kernel density estimate for the predicted location is:
[0127]
[0128] Density threshold τ for the ith target i 'for:
[0129]
[0130] σ' is a normalization constant.
[0131] when greater than τ i ', the predicted position agrees with the measured value. if c 0 equal to c i , then...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More