

Upper limb power-assisted exoskeleton robot
A technology for exoskeleton robots and upper limbs, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of poor load capacity and low rigidity, and achieve the effects of improved control effect, high driving capacity, and small inertial force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
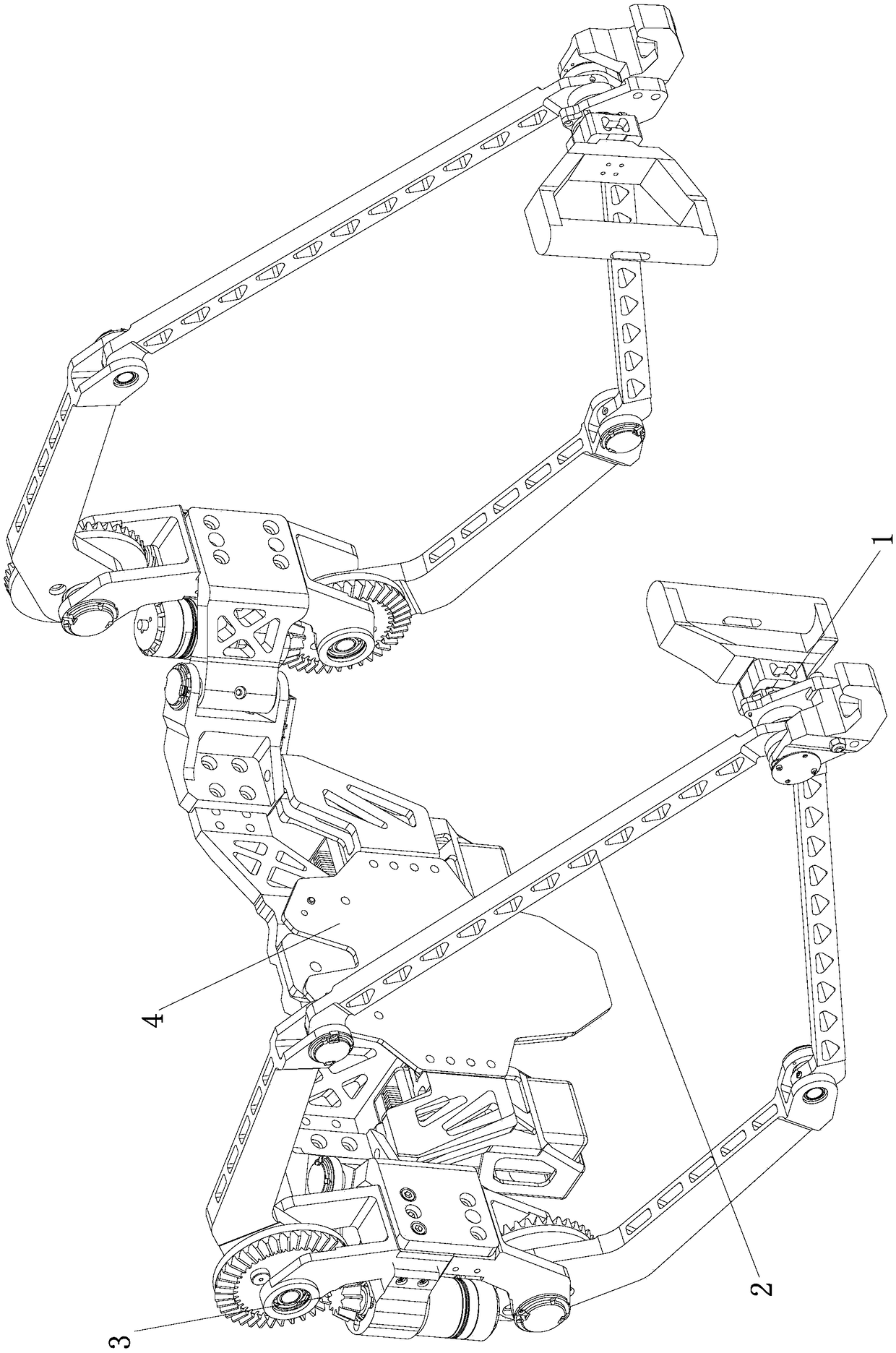
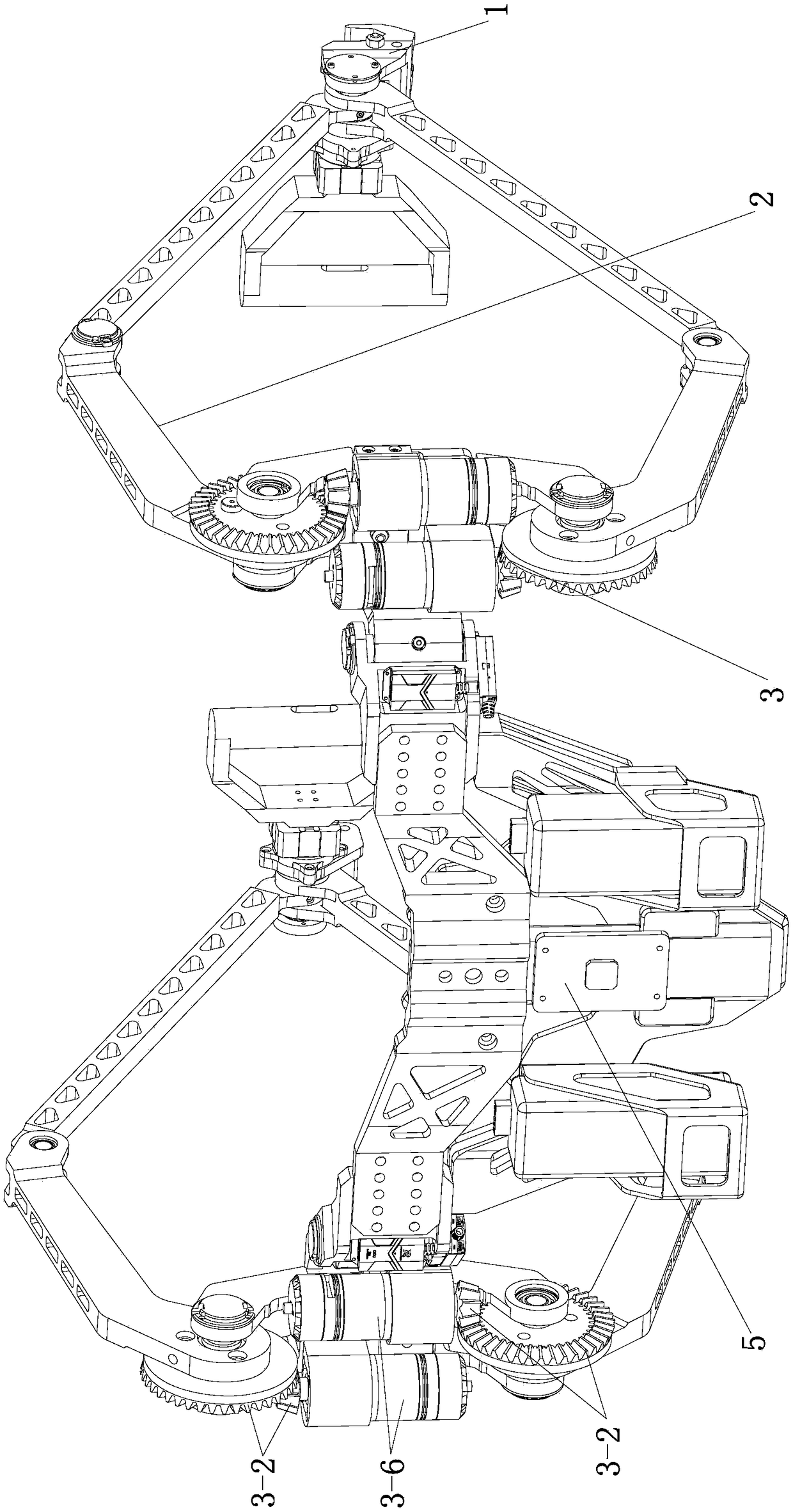
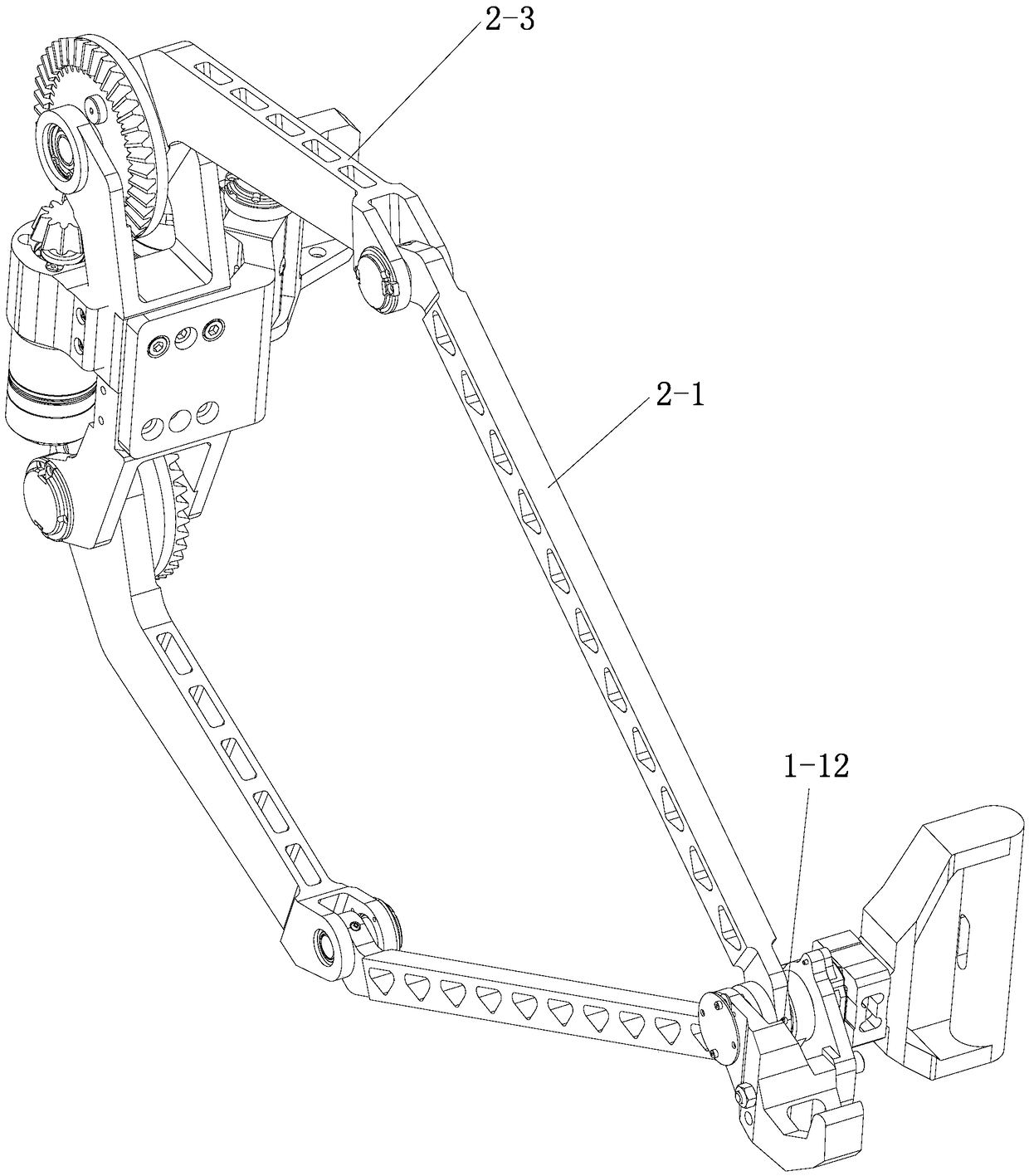
[0040] The upper limb assist exoskeleton robot includes a hand 1, an arm 2, a back 4, a drive mechanism 3 and a control module 5; the drive mechanism 3 is connected to both sides of the back 4, and the control module 5 is installed on the back 4 Above, the hand 1 is connected to the arm 2, each of the arms 2 is a parallel joint structure, the arm 2 is driven by the driving mechanism 3, and the driving mechanism 3 is controlled by the control module 5 The big arm connecting rod 2-3 and the forearm connecting rod 2-1 are all connected with the elbow joint shaft 2-4, and the big arm connecting rod 2-3 and the small arm connecting rod 2-1 can rotate relatively, and the big arm is connected The rod 2-3 is driven by the drive mechanism 3, and the two forearm connecting rods 2-1 are connected with the hand 1, and the two forearm connecting rods 2-1 can rotate relative to the hand 1; the hook 1-18 and the two The first forearm connecting rod 2-1 is respectively connected with the hand...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More