

A wheel-leg composite mobile robot with repeatable flight
A mobile robot and flying wheel technology, applied in the field of repeatable flying wheel-leg compound mobile robots, to achieve the effects of high intelligence level, long flight endurance, and comprehensive mobile efficiency improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
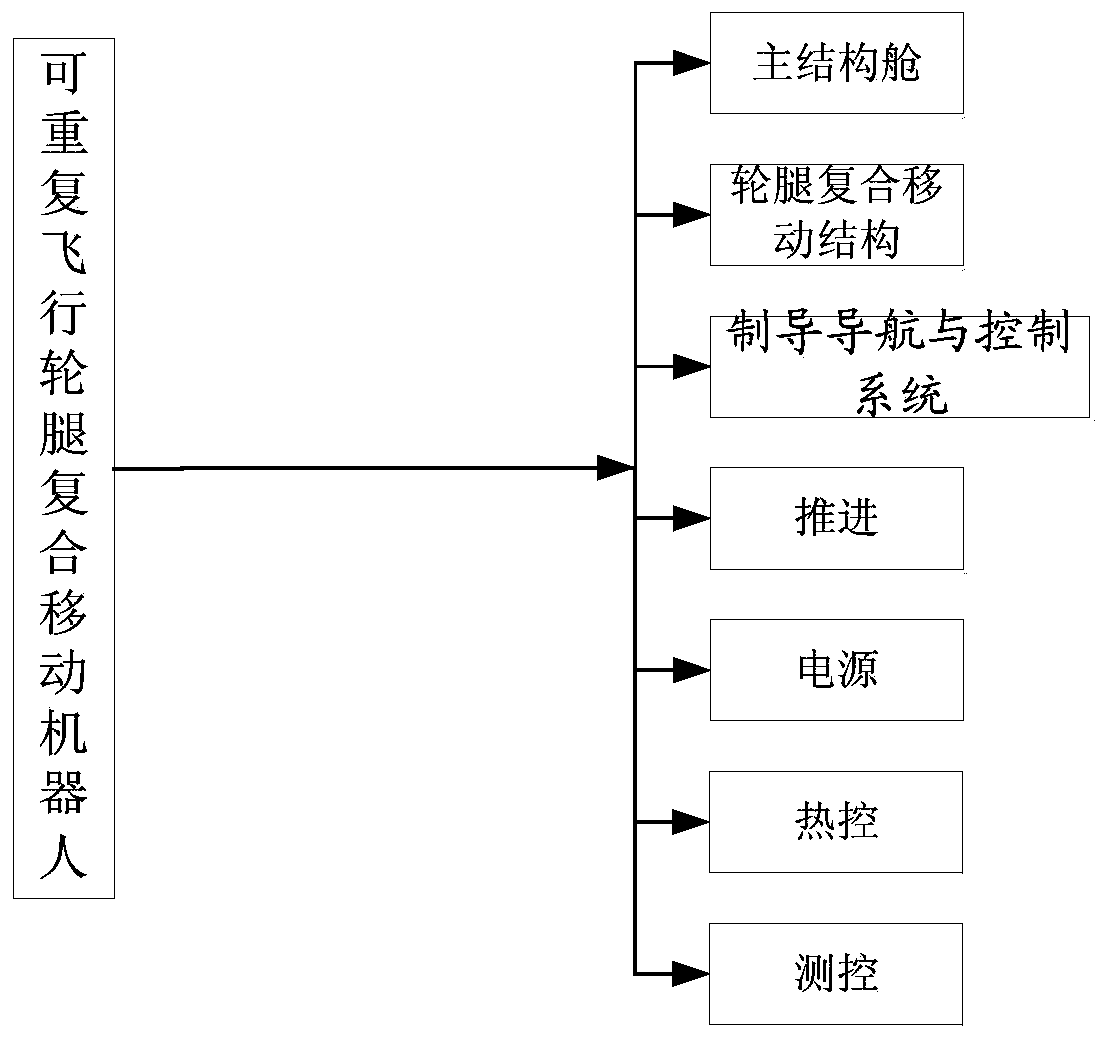
[0030] Such as figure 1 As shown, a wheel-leg composite mobile robot that can fly repeatedly includes a main cabin, a wheel-leg composite mobile mechanism, a propulsion system, a guidance navigation and control system, a power supply system, measurement and control, and a load;
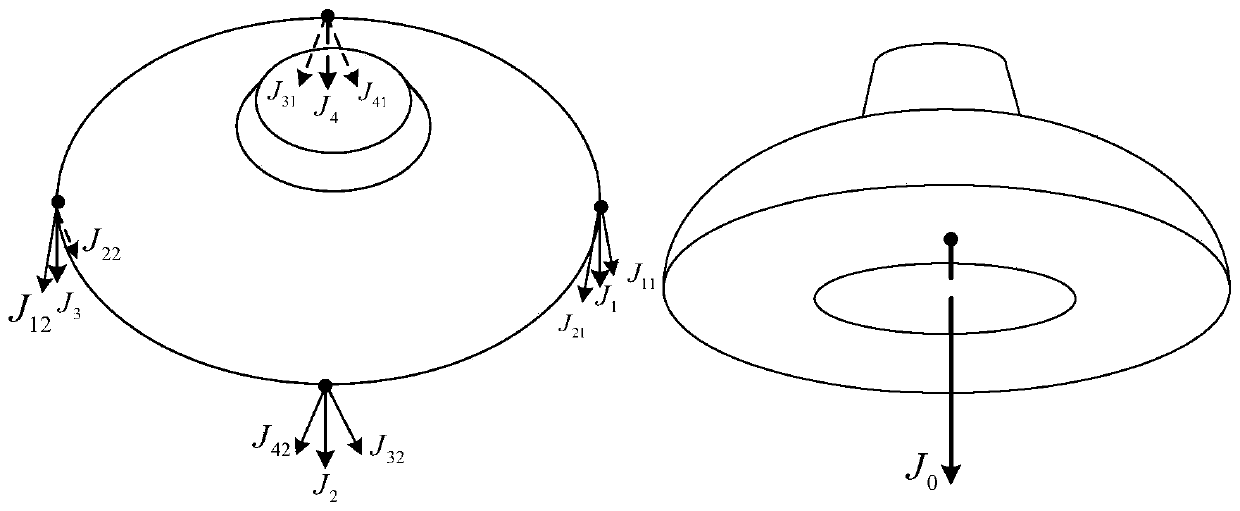
[0031] As the main load-bearing structure of the robot, the main cabin adopts a centrally symmetrical butterfly or semi-conical design, providing installation interfaces for the wheel-leg composite mobile mechanism, propulsion system, guidance navigation and control system, power supply, measurement and control, and load;
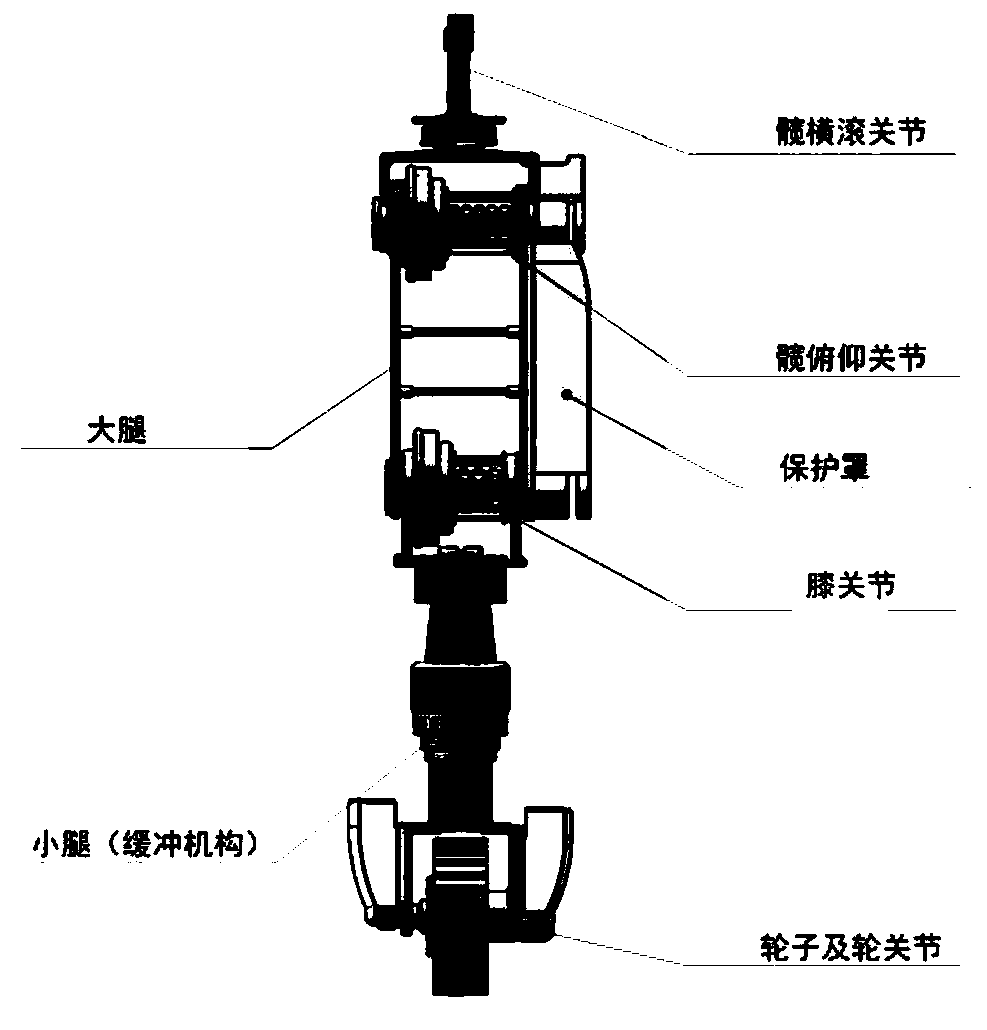
[0032] The robot includes four wheel-leg compound moving mechanisms, and each wheel-leg compound moving mechanism includes thighs, calves, wheel feet, leg joints, repetitive buffer shock-absorbing mechanisms and force sensors;
[0033] The power supply system adopts "battery + solar panel" power supply, one main battery and one backup, installed inside the main cabin; the solar pan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More