

A hexapod robot
A hexapod robot and foot technology, applied in the field of robots, can solve the problems of difficult to achieve rapid steering, reduce bearing weight, increase construction cost, etc., and achieve the effect of reducing the difficulty of control calculation, reducing the number, and shortening the time consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The embodiments of the technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings. The following embodiments are only used to explain the technical solutions of the present invention more clearly, and therefore are only used as examples, and cannot be used to limit the protection scope of the present invention.
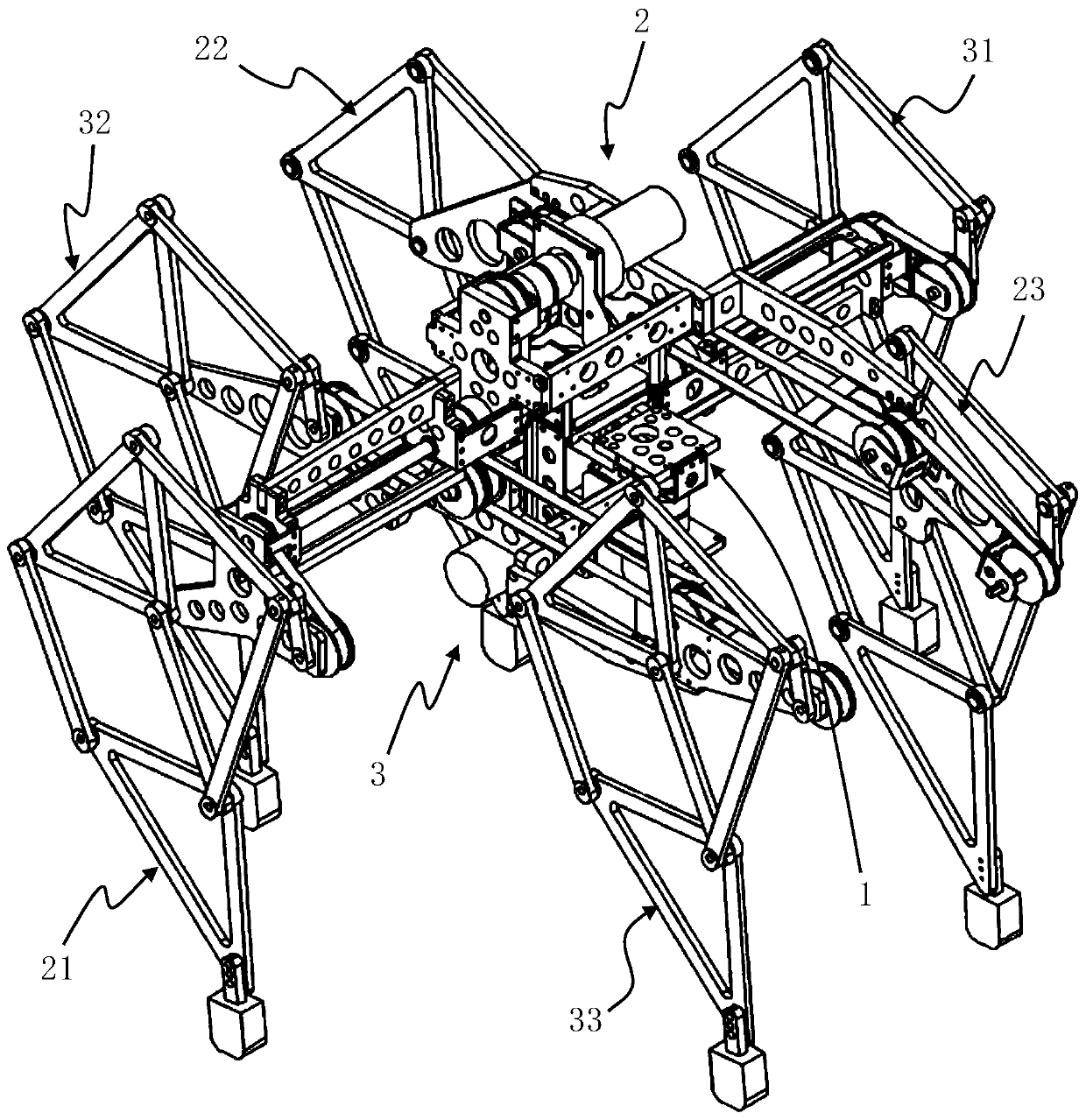
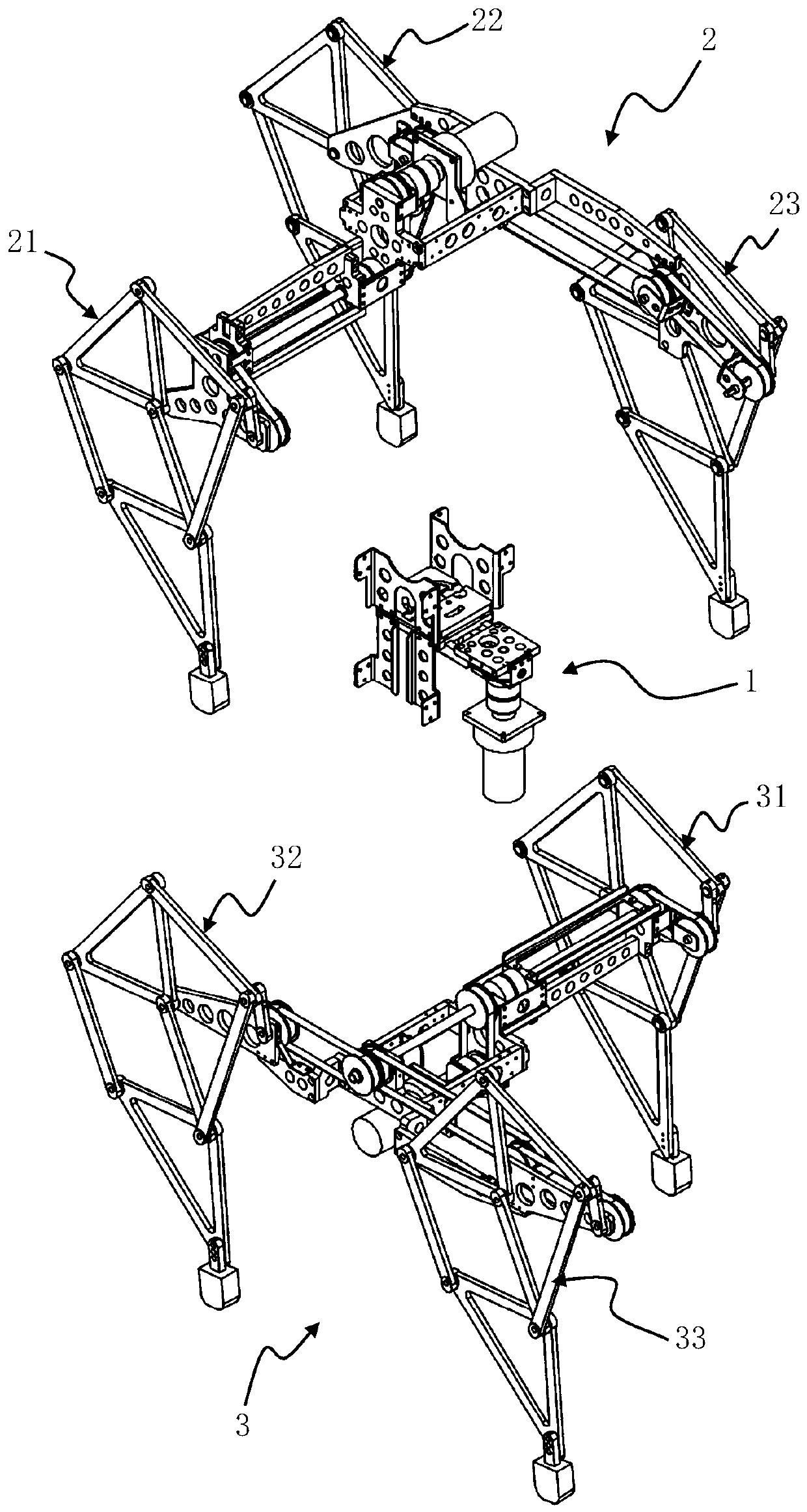
[0038] Such as figure 1 with figure 2 As shown, this embodiment discloses a hexapod robot, which includes a slewing mechanism 1, an upper frame 2 and a lower frame 3. The upper frame 2 and the lower frame 3 are separately arranged on the upper and lower sides of the slewing mechanism 1. The frame 2 and the lower frame 3 are respectively connected with three foot structures of the hexapod robot, and the above-mentioned turning mechanism 1 can respectively drive the upper frame 2 and the lower frame 3 to rotate as a whole. Specifically, the upper frame 2 is provided with a first foot structure 21, a s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More