

Accelerometer combined error coefficient separation and calibration method under reference uncertainty condition
A technology of accelerometer and combined error, which is applied in speed/acceleration/shock measurement, testing/calibration of speed/acceleration/shock measurement equipment, and measurement devices, etc., which can solve the influence of frame angle zero offset error and accelerometer calibration error accuracy And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] This method mainly simplifies the full model of the accelerometer error into a linear simplified model, and separates the error coefficient linearly. At the same time, the error model of the accelerometer comprehensively considers the error of the accelerometer itself and the error of the platform, and can still separate and calibrate the error coefficients of the platform and the accelerometer when the horizontal reference and azimuth reference of the platform are not accurate Come out, reduce the accuracy requirement of the benchmark when the inertial measurement system is calibrated, and improve the calibration accuracy of the error coefficient of the accelerometer.
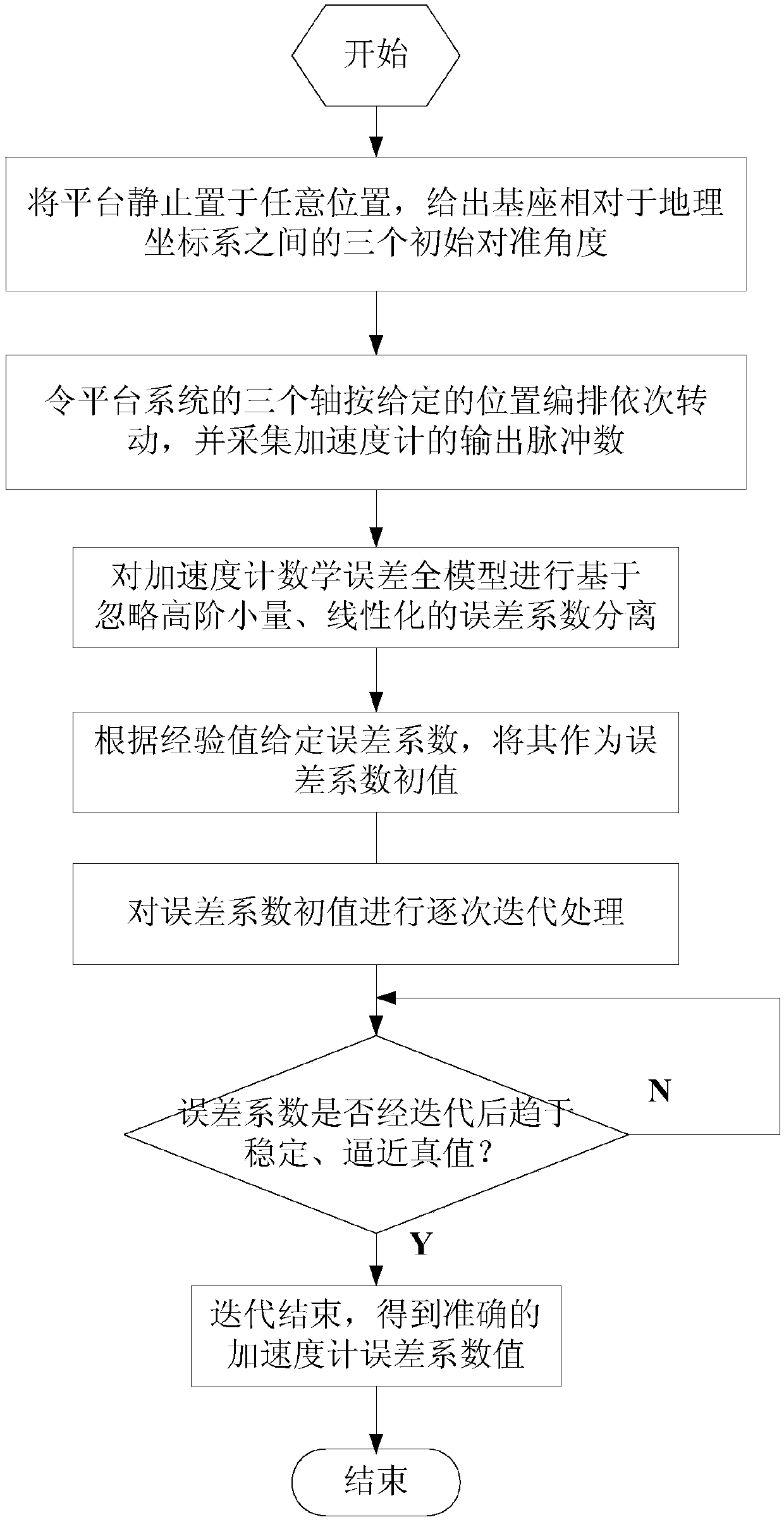
[0064] The test process flow chart of the inventive method is as figure 1 As shown, the specific steps are as follows:
[0065] 1. Put the inertial platform system at a fixed position on the ground, and obtain three initial alignment angles between the platform base and the geographic coordinate system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More